|
Jafar
|
|
Jafar
|
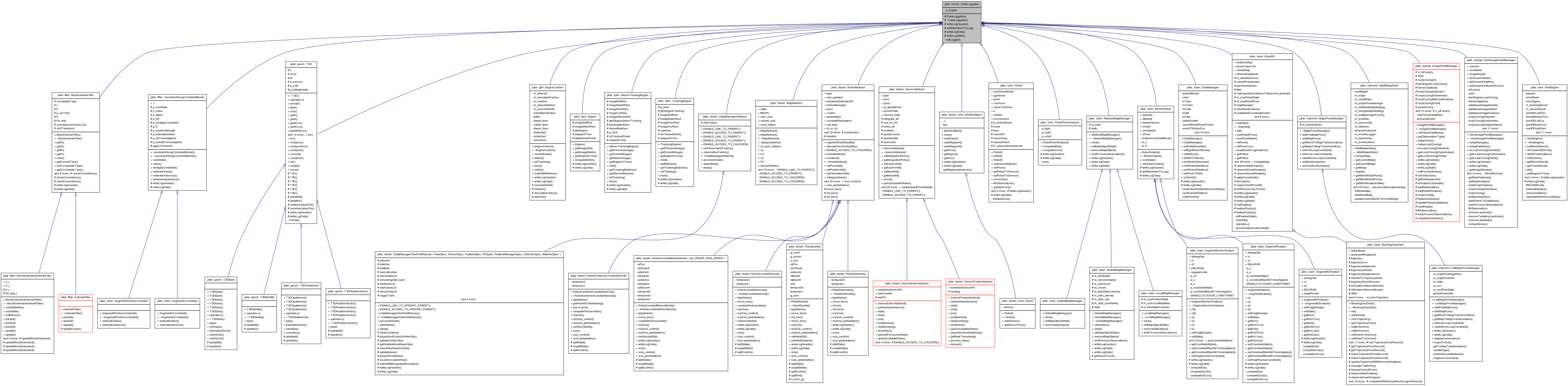
Interface DataLoggable. More...
Interface DataLoggable.
Objects which send data to a DataLogger have to implement this interface.
Definition at line 104 of file dataLog.hpp.
#include <dataLog.hpp>
Protected Member Functions | |
| virtual void | writeLogHeader (DataLogger &log) const =0 |
| Implements this method calling repeatidly log methods. | |
| virtual void | addMembersToLog (DataLogger &log) const |
| Once the loggable has been added, this method is called so that the loggable can add some of its members to the log. | |
| virtual void | writeLogData (DataLogger &log) const =0 |
| Implements this method calling repeatidly log methods. | |
| virtual void | writeLogStats (DataLogger &log) const |
| write stats at the end of the log | |
Private Member Functions | |
| void | setLogger (DataLogger &logger) |
Private Attributes | |
| DataLogger * | p_logger |
| My logger. | |
Friends | |
| class | DataLogger |
| virtual void jafar::kernel::DataLoggable::addMembersToLog | ( | DataLogger & | log | ) | const [inline, protected, virtual] |
Once the loggable has been added, this method is called so that the loggable can add some of its members to the log.
Implements this method calling addLoggable(). By default this method is empty.
Reimplemented in jafar::slammm::MultiMapsSlam, and jafar::slam::BaseFeature.
Definition at line 129 of file dataLog.hpp.
| virtual void jafar::kernel::DataLoggable::writeLogData | ( | DataLogger & | log | ) | const [protected, pure virtual] |
Implements this method calling repeatidly log methods.
You should use writeData() or writeDataVector().
Implemented in jafar::rtslam::RobotAbstract, jafar::slampt::ImagePointManager, jafar::slam::SegmentFeature, jafar::vme::VmeEngine, jafar::hpm::StereoTrackingEngine, jafar::rtslam::RobotInertial, jafar::geom::T3D, jafar::slam::GlobalMapManager, jafar::slam::BearingOnlySlam, jafar::rtslam::SensorAbstract, jafar::slampt::OmniImagePointManager, jafar::rtslam::DataManagerOnePointRansac< RawSpec, SensorSpec, FeatureSpec, RoiSpec, FeatureManagerSpec, DetectorSpec, MatcherSpec >, jafar::rtslam::simu::MobileObject, jafar::rtslam::MapAbstract, jafar::simu::RobotPoseAnalysis, jafar::slammm::MultiMapsSlam, jafar::slam::SlamEkf, jafar::rtslam::RobotConstantMotionModel< LIN_ORDER, ANG_ORDER >, jafar::slam::DalaManager, jafar::filter::BaseKalmanFilter, jafar::hpm::TrackingEngine, jafar::simu::Robot, jafar::rtslam::RobotConstantVelocity, jafar::rtslam::RobotOdometry, jafar::gfm::EngineCustom, jafar::slam::BaseFeature, jafar::slam::SegmentAnchorFeature, jafar::slam::SegmentIDFeature, jafar::slam::AbstractMapManager, jafar::filter::JacobianStrongConstraintModel, jafar::hpm::Engine, and jafar::slammm::ListMapsPoseManager.
| virtual void jafar::kernel::DataLoggable::writeLogHeader | ( | DataLogger & | log | ) | const [protected, pure virtual] |
Implements this method calling repeatidly log methods.
You should use writeComment(), writeLegend() or writeLegendTokens().
Implemented in jafar::rtslam::RobotAbstract, jafar::slampt::ImagePointManager, jafar::slam::SegmentFeature, jafar::vme::VmeEngine, jafar::hpm::StereoTrackingEngine, jafar::rtslam::RobotInertial, jafar::geom::T3D, jafar::slam::GlobalMapManager, jafar::slam::BearingOnlySlam, jafar::rtslam::SensorAbstract, jafar::slampt::OmniImagePointManager, jafar::rtslam::DataManagerOnePointRansac< RawSpec, SensorSpec, FeatureSpec, RoiSpec, FeatureManagerSpec, DetectorSpec, MatcherSpec >, jafar::rtslam::MapAbstract, jafar::rtslam::simu::MobileObject, jafar::slammm::MultiMapsSlam, jafar::slam::SlamEkf, jafar::simu::RobotPoseAnalysis, jafar::rtslam::RobotConstantMotionModel< LIN_ORDER, ANG_ORDER >, jafar::slam::DalaManager, jafar::filter::BaseKalmanFilter, jafar::hpm::TrackingEngine, jafar::simu::Robot, jafar::rtslam::RobotConstantVelocity, jafar::rtslam::RobotOdometry, jafar::gfm::EngineCustom, jafar::slam::BaseFeature, jafar::slam::SegmentAnchorFeature, jafar::slam::SegmentIDFeature, jafar::slam::AbstractMapManager, jafar::filter::JacobianStrongConstraintModel, jafar::hpm::Engine, and jafar::slammm::ListMapsPoseManager.
| Generated on Wed Oct 15 2014 00:37:40 for Jafar by doxygen 1.7.6.1 |

|

