|
Jafar
|
|
Jafar
|
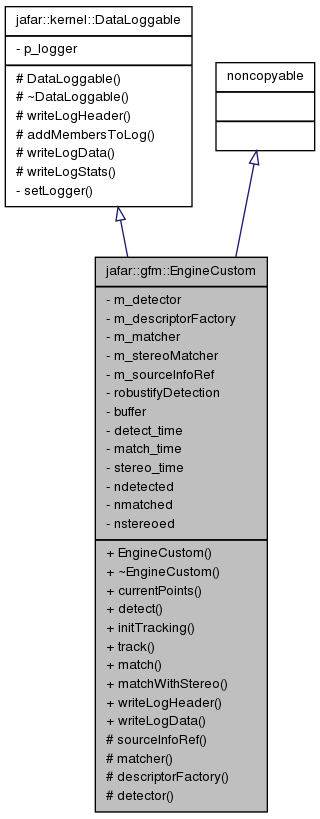
This class is a matcher and tracker that allows to modify interest points that are used. More...
This class is a matcher and tracker that allows to modify interest points that are used.
Definition at line 28 of file EngineCustom.hpp.
#include <EngineCustom.hpp>
Public Member Functions | |
| EngineCustom (jafar::fdetect::Detector *detector, jafar::gfm::Matcher *matcher, jafar::gfm::Matcher *stereomatcher=0, jafar::fdetect::DescriptorFactory *descriptor=0, bool robustifyDetection=false) | |
|
const jafar::fdetect::DetectionResult & | currentPoints () const |
| jafar::fdetect::DetectionResult | detect (jafar::image::Image const &image_ref) |
| Detects interest points in an image. | |
| void | initTracking (jafar::image::Image const &image_ref, jafar::fdetect::DetectionResult &points_ref) |
| Initialize a tracking sequence. | |
| jafar::gfm::MatchingResult | track (jafar::image::Image const &image_match, jafar::fdetect::DetectionResult &points_match) |
| Track the interest points in the next image from the previous image (either initialized with initTracking or given by a previous call to this function) | |
| jafar::gfm::MatchingResult | match (jafar::image::Image const &image_ref, jafar::fdetect::DetectionResult &points_ref, jafar::image::Image const &image_match, jafar::fdetect::DetectionResult &points_match) |
| Match two images. | |
| jafar::gfm::MatchingResult | matchWithStereo (jafar::image::Image const &image_match, jafar::fdetect::DetectionResult &points_match) |
| Match a previously stored image (with initTracking or track) with another image, usually the righ image of a stereo bench when tracking is done on left image. | |
| virtual void | writeLogHeader (jafar::kernel::DataLogger &log) const |
| Implements this method calling repeatidly log methods. | |
| virtual void | writeLogData (jafar::kernel::DataLogger &log) const |
| Implements this method calling repeatidly log methods. | |
Protected Member Functions | |
| MatchSourceInfo * | sourceInfoRef () const |
| Matcher * | matcher () |
| fdetect::DescriptorFactory * | descriptorFactory () |
| fdetect::Detector * | detector () |
Private Attributes | |
| fdetect::Detector * | m_detector |
| fdetect::DescriptorFactory * | m_descriptorFactory |
| Matcher * | m_matcher |
| Matcher * | m_stereoMatcher |
| MatchSourceInfo * | m_sourceInfoRef |
| bool | robustifyDetection |
| image::Image | buffer |
| long | detect_time |
| long | match_time |
| long | stereo_time |
| int | ndetected |
| int | nmatched |
| int | nstereoed |
| jafar::fdetect::DetectionResult jafar::gfm::EngineCustom::detect | ( | jafar::image::Image const & | image_ref | ) |
Detects interest points in an image.
| image_ref |
| void jafar::gfm::EngineCustom::initTracking | ( | jafar::image::Image const & | image_ref, |
| jafar::fdetect::DetectionResult & | points_ref | ||
| ) |
Initialize a tracking sequence.
| image_ref | the first image of the sequence |
| points_ref | the interest points detected in the image |
| jafar::gfm::MatchingResult jafar::gfm::EngineCustom::match | ( | jafar::image::Image const & | image_ref, |
| jafar::fdetect::DetectionResult & | points_ref, | ||
| jafar::image::Image const & | image_match, | ||
| jafar::fdetect::DetectionResult & | points_match | ||
| ) |
Match two images.
| image_ref | the first image |
| points_ref | the interest points of the first image |
| image_match | the second image |
| points_match | the interest points of the second image |
| jafar::gfm::MatchingResult jafar::gfm::EngineCustom::matchWithStereo | ( | jafar::image::Image const & | image_match, |
| jafar::fdetect::DetectionResult & | points_match | ||
| ) |
Match a previously stored image (with initTracking or track) with another image, usually the righ image of a stereo bench when tracking is done on left image.
| image_match | |
| points_match |
| jafar::gfm::MatchingResult jafar::gfm::EngineCustom::track | ( | jafar::image::Image const & | image_match, |
| jafar::fdetect::DetectionResult & | points_match | ||
| ) |
Track the interest points in the next image from the previous image (either initialized with initTracking or given by a previous call to this function)
| image_match | the next image in the sequence |
| points_match | the interest features in the image |
| virtual void jafar::gfm::EngineCustom::writeLogData | ( | jafar::kernel::DataLogger & | log | ) | const [virtual] |
Implements this method calling repeatidly log methods.
You should use writeData() or writeDataVector().
Implements jafar::kernel::DataLoggable.
| virtual void jafar::gfm::EngineCustom::writeLogHeader | ( | jafar::kernel::DataLogger & | log | ) | const [virtual] |
Implements this method calling repeatidly log methods.
You should use writeComment(), writeLegend() or writeLegendTokens().
Implements jafar::kernel::DataLoggable.
| Generated on Wed Oct 15 2014 00:37:38 for Jafar by doxygen 1.7.6.1 |

|

