|
Jafar
|
|
Jafar
|
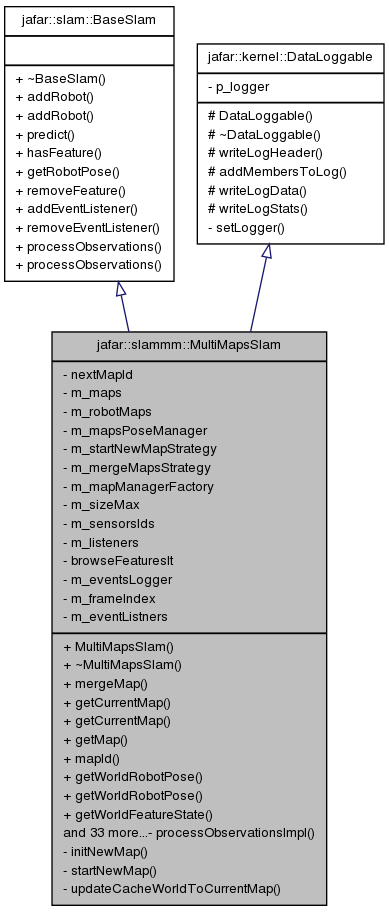
Definition at line 26 of file MultiMapManager.hpp.
Classes | |
| struct | RobotMaps |
| struct | SlamEkfInfo |
| This structure contains a filter and various information. More... | |
Public Member Functions | |
| MultiMapsSlam (std::size_t sizeMax_, MapsPoseManager *_mapsPoseManager, StartNewMapStrategy *_startNewMapStrategy, MergeMapsStrategy *_mergeMapsStrategy, slam::MapManagerFactory *mapManagerFactory=0, int firstMapId=0) | |
| void | mergeMap (unsigned int _map1Id, unsigned int _map2Id, const geom::T3DEuler &transfo) |
| Merge the map of a robot into the map of an other map. | |
| slam::SlamEkf * | getCurrentMap (unsigned int _robotId=0) |
| Function that return the current map. | |
| const slam::SlamEkf * | getCurrentMap (unsigned int _robotId=0) const |
| slam::SlamEkf * | getMap (unsigned int _mapId, unsigned int _robotId=0) |
| unsigned int | mapId (slam::SlamEkf *) const |
| void | getWorldRobotPose (jafar::geom::T3DEuler &pose, unsigned int _robotId=0) const |
| Function that return the global position of the robot. | |
| jafar::geom::T3DEuler | getWorldRobotPose (unsigned int _robotId=0) const |
| void | getWorldFeatureState (jblas::vec &_result, unsigned int _featureId, unsigned int _currentMapId) const |
| void | getWorldFeatureState (jblas::vec &_result, jblas::sym_mat &_resultCov, unsigned int _featureId, unsigned int _currentMapId) const |
| jafar::geom::T3DEuler | getWorldToCurrentMapTransformation (unsigned int _robotId=0) const |
| Get the transformation from the World frame to current map. | |
| jafar::geom::T3DEuler | getWorldToMapTransformation (unsigned int _mapId) const |
| Get the transformation from the World frame to a given map. | |
| void | beginBrowseMaps () |
| bool | hasNextMap () |
| slam::SlamEkf * | nextMap () |
|
const std::map< unsigned int, slam::SlamEkf * > | getMaps () const |
| slam::SlamEkf * | getGlobalMap () const |
| Merge all maps in one global map, using a similar method as Divide & Conquer. | |
| void | addRobot (slam::BaseRobot *) |
| void | addRobot (slam::BaseRobot *, const jblas::vec &_robotState, const jblas::sym_mat &_robotStateCov) |
| void | setSensor (slam::FeatureObserveModel *model, unsigned int sensorId, unsigned int _robotId) |
| void | setRobotToSensor (jblas::vec const &robotToSensor, int sensorId, unsigned int _robotId) |
| virtual void | predict (unsigned int _robotId, jblas::vec const &u) |
| virtual bool | hasFeature (unsigned int id, unsigned int _robotId=0) const |
| virtual void | getRobotPose (jafar::geom::T3DEuler &pose, unsigned int _robotId=0) const |
| virtual void | removeFeature (unsigned int id) |
| virtual void | addEventListener (slam::SlamEventListener &listener) |
| virtual void | removeEventListener (slam::SlamEventListener &listener) |
| virtual void | processObservations (unsigned int frameIndex_, std::list< slam::Observation * > const &knownObs, std::list< slam::Observation * > const &newObs, unsigned int robotId_=0, int events_=slam::SlamEventListener::ALL) |
| virtual void | processObservations (unsigned int frameIndex_, std::vector< slam::Observation * > const &knownObs, std::vector< slam::Observation * > const &newObs, unsigned int robotId_=0, int events_=slam::SlamEventListener::ALL) |
| template<typename SequenceType > | |
| void | processObservations (unsigned int frameIndex_, SequenceType const &allObs, unsigned int robotId_=0, int events_=slam::SlamEventListener::ALL) |
| void | rendezVous (unsigned int _firstRobotId, unsigned int _secondRobotId, const geom::T3DEuler &firstToSecond) |
| Call this function when a rendez-vous event happen between two robots and that the tranformation between the two robots is known. | |
| void | gpsFix (const std::map< unsigned int, geom::T3DEuler > &worldToRobots) |
| Call this function when the position of multiple robots is known. | |
| void | gpsFix (unsigned int _robotId, const geom::T3DEuler &worldToRobot) |
| Convenient function that will execute a GPS fix event for a single robot. | |
| void | closeLoop (unsigned int _firstMapId, unsigned int _secondMapId, const geom::T3DEuler &firstToSecond) |
| Close the loop between two maps. | |
| bool | canCloseLoop (unsigned int _firstMapId, unsigned int _secondMapId) const |
| virtual void | writeLogHeader (kernel::DataLogger &log) const |
| Implements this method calling repeatidly log methods. | |
| virtual void | writeLogData (kernel::DataLogger &log) const |
| Implements this method calling repeatidly log methods. | |
| virtual void | addMembersToLog (kernel::DataLogger &log) const |
| Once the loggable has been added, this method is called so that the loggable can add some of its members to the log. | |
| void | setEventsDataLogger (kernel::DataLogger *log) |
| Log events that happen in the MultiMapsSlam. | |
| void | addEventListener (MultiMapEventListener *listener) |
| void | removeEventListener (MultiMapEventListener *listener) |
| void | printInfo () |
| Print some information about the multimap manager. | |
| void | startNewMap (unsigned int _robotId) |
Start a new map for robot _robotId. | |
Private Types | |
|
typedef std::map< unsigned int, slam::FeatureObserveModel * > | FeatureObserveModelsContType |
Private Member Functions | |
| template<class SequenceType1 , class SequenceType2 > | |
| void | processObservationsImpl (unsigned int frameIndex_, SequenceType1 const &knownObs, SequenceType2 const &newObs, unsigned int _robotId, int events_) |
| Process observations, it will create a new map if needed. | |
| void | initNewMap (unsigned int _robotId) |
| void | startNewMap (RobotMaps &) |
| void | updateCacheWorldToCurrentMap () |
| Update all world transformation that are cached in RobotMaps. | |
Private Attributes | |
| int | nextMapId |
|
std::map< unsigned int, SlamEkfInfo > | m_maps |
| std::map< unsigned int, RobotMaps > | m_robotMaps |
| MapsPoseManager * | m_mapsPoseManager |
| StartNewMapStrategy * | m_startNewMapStrategy |
| MergeMapsStrategy * | m_mergeMapsStrategy |
| slam::MapManagerFactory * | m_mapManagerFactory |
| std::size_t | m_sizeMax |
| std::list< unsigned int > | m_sensorsIds |
| list of sensors ids, this list is used by setSensor to ensure that the id of a sensor is unique | |
|
std::list < slam::SlamEventListener * > | m_listeners |
|
std::map< unsigned int, SlamEkfInfo >::iterator | browseFeaturesIt |
| kernel::DataLogger * | m_eventsLogger |
| unsigned int | m_frameIndex |
|
std::list < MultiMapEventListener * > | m_eventListners |
| jafar::slammm::MultiMapsSlam::MultiMapsSlam | ( | std::size_t | sizeMax_, |
| MapsPoseManager * | _mapsPoseManager, | ||
| StartNewMapStrategy * | _startNewMapStrategy, | ||
| MergeMapsStrategy * | _mergeMapsStrategy, | ||
| slam::MapManagerFactory * | mapManagerFactory = 0, |
||
| int | firstMapId = 0 |
||
| ) |
| sizeMax_ | the maximum size of the state of a local map |
| virtual void jafar::slammm::MultiMapsSlam::addMembersToLog | ( | kernel::DataLogger & | log | ) | const [virtual] |
Once the loggable has been added, this method is called so that the loggable can add some of its members to the log.
Implements this method calling addLoggable(). By default this method is empty.
Reimplemented from jafar::kernel::DataLoggable.
Merge all maps in one global map, using a similar method as Divide & Conquer.
The maps of MultiMapsSlam are not touched and remain valid after a call to this function.
| slam::SlamEkf* jafar::slammm::MultiMapsSlam::getMap | ( | unsigned int | _mapId, |
| unsigned int | _robotId = 0 |
||
| ) |
| void jafar::slammm::MultiMapsSlam::getWorldFeatureState | ( | jblas::vec & | _result, |
| unsigned int | _featureId, | ||
| unsigned int | _currentMapId | ||
| ) | const |
| void jafar::slammm::MultiMapsSlam::getWorldFeatureState | ( | jblas::vec & | _result, |
| jblas::sym_mat & | _resultCov, | ||
| unsigned int | _featureId, | ||
| unsigned int | _currentMapId | ||
| ) | const |
| jafar::geom::T3DEuler jafar::slammm::MultiMapsSlam::getWorldToMapTransformation | ( | unsigned int | _mapId | ) | const |
Get the transformation from the World frame to a given map.
| _mapiId |
| void jafar::slammm::MultiMapsSlam::gpsFix | ( | const std::map< unsigned int, geom::T3DEuler > & | worldToRobots | ) |
Call this function when the position of multiple robots is known.
This function will start a new map for each robot.
| void jafar::slammm::MultiMapsSlam::gpsFix | ( | unsigned int | _robotId, |
| const geom::T3DEuler & | worldToRobot | ||
| ) |
Convenient function that will execute a GPS fix event for a single robot.
This function will start a new map for each robot.
| unsigned int jafar::slammm::MultiMapsSlam::mapId | ( | slam::SlamEkf * | ) | const |
| void jafar::slammm::MultiMapsSlam::rendezVous | ( | unsigned int | _firstRobotId, |
| unsigned int | _secondRobotId, | ||
| const geom::T3DEuler & | firstToSecond | ||
| ) |
Call this function when a rendez-vous event happen between two robots and that the tranformation between the two robots is known.
This function will start a new map for each robot.
| virtual void jafar::slammm::MultiMapsSlam::writeLogData | ( | kernel::DataLogger & | log | ) | const [virtual] |
Implements this method calling repeatidly log methods.
You should use writeData() or writeDataVector().
Implements jafar::kernel::DataLoggable.
| virtual void jafar::slammm::MultiMapsSlam::writeLogHeader | ( | kernel::DataLogger & | log | ) | const [virtual] |
Implements this method calling repeatidly log methods.
You should use writeComment(), writeLegend() or writeLegendTokens().
Implements jafar::kernel::DataLoggable.
| Generated on Wed Oct 15 2014 00:37:50 for Jafar by doxygen 1.7.6.1 |

|

