|
Jafar
|
|
Jafar
|
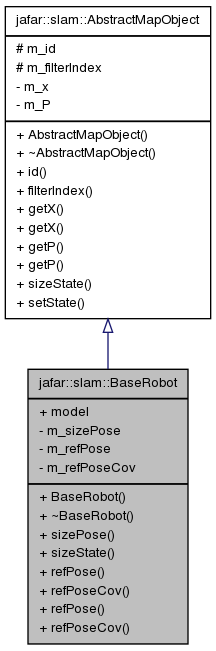
Base robot model. More...
Base robot model.
It gives access to information about the robot state in the filter, such as the index in the filter, or convenient vectors/matrixes that point to the state and covariance.
#include <robot.hpp>
Public Member Functions | |
| BaseRobot (unsigned int id, jafar::filter::JacobianBlockCommandPredictModel &model, std::size_t sizePose=6) | |
| std::size_t | sizePose () const |
| std::size_t | sizeState () const |
| jblas::vec_range * | refPose () |
| jblas::sym_mat_range * | refPoseCov () |
| const jblas::vec_range * | refPose () const |
| const jblas::sym_mat_range * | refPoseCov () const |
Public Attributes | |
| jafar::filter::JacobianBlockCommandPredictModel & | model |
Private Attributes | |
| std::size_t | m_sizePose |
| jblas::vec_range * | m_refPose |
| jblas::sym_mat_range * | m_refPoseCov |
Friends | |
| class | SlamEkf |
| jblas::vec_range* jafar::slam::BaseRobot::refPose | ( | ) | [inline] |
| const jblas::vec_range* jafar::slam::BaseRobot::refPose | ( | ) | const [inline] |
| jblas::sym_mat_range* jafar::slam::BaseRobot::refPoseCov | ( | ) | [inline] |
| const jblas::sym_mat_range* jafar::slam::BaseRobot::refPoseCov | ( | ) | const [inline] |
| std::size_t jafar::slam::BaseRobot::sizePose | ( | ) | const [inline] |
| std::size_t jafar::slam::BaseRobot::sizeState | ( | ) | const [virtual] |
Implements jafar::slam::AbstractMapObject.
| Generated on Wed Oct 15 2014 00:37:49 for Jafar by doxygen 1.7.6.1 |

|

