|
Jafar
|
|
Jafar
|
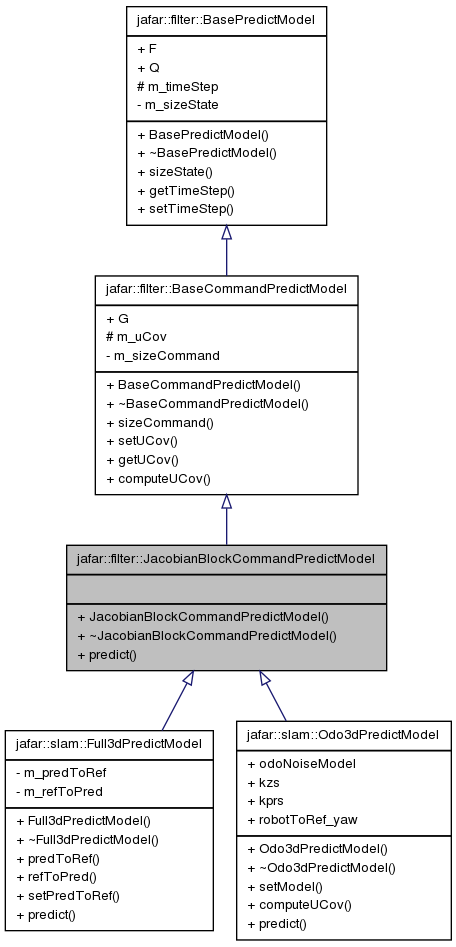
Non linear prediction with an input command model defined for one block. More...
Non linear prediction with an input command model defined for one block.
To define your own model you must derive this class. This model is well suited for robot state prediction in the SLAM problem.
Definition at line 244 of file predictModel.hpp.
#include <predictModel.hpp>
Public Member Functions | |
| JacobianBlockCommandPredictModel (std::size_t sizeState, std::size_t sizeCommand) | |
| virtual void | predict (jblas::vec_range &x_r, jblas::vec const &u_)=0 |
| prediction function. | |
| virtual void jafar::filter::JacobianBlockCommandPredictModel::predict | ( | jblas::vec_range & | x_r, |
| jblas::vec const & | u_ | ||
| ) | [pure virtual] |
prediction function.
predict() implementation should look like:
void MyPredictModel::predict(jblas::vec_range& x_r, jblas::vec const& u_) { // compute jacobian aroud x_t, store it in F // compute jacobian aroud u_, store it in G // compute Q if relevant // compute x_t+1 function of x_t and u_ // store result in x }
Implemented in jafar::slam::Odo3dPredictModel, and jafar::slam::Full3dPredictModel.
| Generated on Wed Oct 15 2014 00:37:36 for Jafar by doxygen 1.7.6.1 |

|

