|
Jafar
|
|
Jafar
|
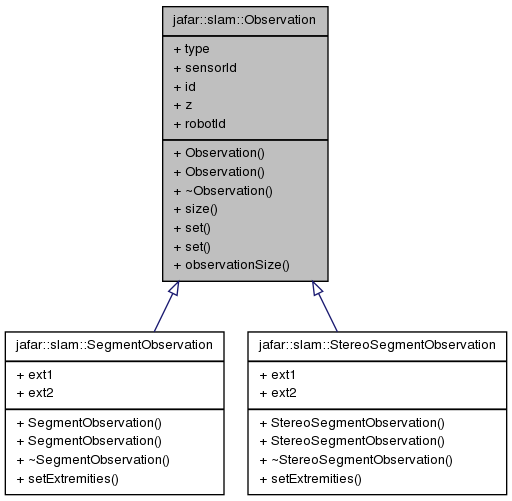
Definition at line 19 of file observation.hpp.
#include <observation.hpp>
Public Types | |
| enum | ObservationType { POINT_CARTESIAN, POINT_POLAR, POINT_STEREOIMAGE, POINT_BEARING, POINT_IMAGE, POINT_OMNIIMAGE, SEGMENT_IMAGE, SEGMENTAP_IMAGE, SEGMENTID_IMAGE, SEGMENTID_EXT_IMAGE, SEGMENT_STEREOIMAGE, BASIS, ROBOT } |
Public Member Functions | |
| Observation (ObservationType type_, unsigned int robotId_=0) | |
| Observation (Observation const &obs) | |
| std::size_t | size () const |
| void | set (unsigned int id_, const jblas::vec &z_, unsigned int sensorId_=0) |
| void | set (unsigned int id_, const jblas::vec &z_, unsigned int sensorId_, unsigned int robotId_) |
Static Public Member Functions | |
| static std::size_t | observationSize (ObservationType ot) |
Public Attributes | |
| ObservationType | type |
| int | sensorId |
| The id of the sensor (it's a unique number associated to an unique sensor, it's up to the user to choose the numbers) | |
| unsigned int | id |
| Feature Id. | |
| jblas::vec | z |
| Observation vector. | |
| unsigned int | robotId |
| Id of the robot which made an observation. | |
Definition at line 23 of file observation.hpp.
| Generated on Wed Oct 15 2014 00:37:49 for Jafar by doxygen 1.7.6.1 |

|

