|
Jafar
|
|
Jafar
|
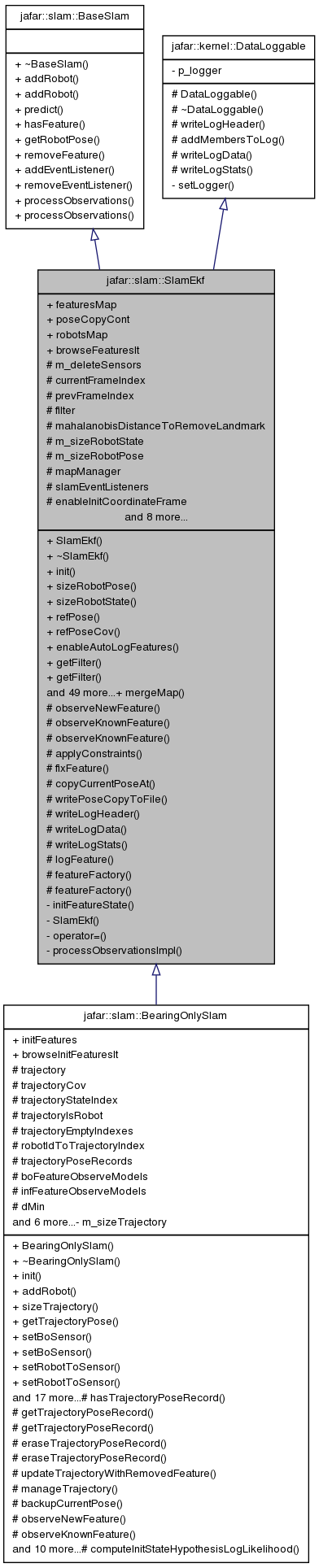
This class solves SLAM problem using the EKF-based academic solution. More...
This class solves SLAM problem using the EKF-based academic solution.
The pose of the robot is represented using Euler angle in a vector ![$ [x,y,z,yaw,pitch,roll] $](form_34.png) .
.
add robot model, also with constraints (for attitude quaternion for instance)
free space management in the state vector ! (when the removeLandmark function is used)
Definition at line 44 of file slamEkf.hpp.
#include <slamEkf.hpp>
Classes | |
| class | Stats |
Public Types | |
| enum | MergeMapNumber { MAP_1, MAP_2 } |
| Merge two maps, and creates a new one. More... | |
|
typedef std::map< unsigned int, BaseFeature * > | FeaturesMapType |
|
typedef std::map< unsigned int, PoseCopy * > | PoseCopyContType |
|
typedef std::map< unsigned int, BaseRobot * > | RobotsMapType |
Public Member Functions | |
| SlamEkf (std::size_t sizeMax_, std::size_t sizeRobotState_, std::size_t sizeRobotPose_) | |
| Constructor. | |
| virtual | ~SlamEkf () |
| Destructor. | |
| virtual void | init (boost::posix_time::time_duration const &curTime) |
| clear the map and the robot pose | |
| std::size_t | sizeRobotPose () const |
| Return robot's pose size. | |
| std::size_t | sizeRobotState () const |
| Returns robot's state size. | |
| jblas::vec_range const & | refPose (int _robotId=0) const |
| Return robot pose. | |
| jblas::sym_mat_range const & | refPoseCov (int _robotId=0) const |
| Return robot pose covariances matrix. | |
| void | enableAutoLogFeatures (jafar::kernel::DataLogger &masterLogger) |
| jafar::filter::BlockExtendedKalmanFilter & | getFilter () |
| get the SLAM filter | |
|
jafar::filter::BlockExtendedKalmanFilter const & | getFilter () const |
| get the SLAM filter | |
| FeaturesMapType const & | getMap () const |
| Return the map of features. | |
| jafar::geom::T3D const & | refToRobot () const |
| jafar::geom::T3D const & | robotToRef () const |
| void | setRefToRobot (jafar::geom::T3DEuler const &refToRobot_) |
| void | setRobotPose (jblas::vec const &robotPose, int _robotId=0) |
| void | setRobotPoseCov (jblas::vec const &robotPose, jblas::sym_mat const &robotPoseCov, int _robotId=0) |
| FeatureObserveModel & | getFeatureObserveModel (unsigned int sensorId=0) const |
| unsigned int | getCurrentFrameIndex () const |
| unsigned int | getPrevFrameIndex () const |
| void | setMapManager (AbstractMapManager *mapManager_) |
| void | setDeleteSensors (bool) |
| Set wether the SlamEkf can delete FeatureObserveModel pass as argument of setSensor . | |
| void | setSensor (FeatureObserveModel *model, int sensorId=0) |
| Add a sensor with its feature model. | |
| void | setRobotZ (double z, double zStdDev, int _robotId=0) |
| void | setRobotPitch (double pitch, double pitchStdDev, int _robotId=0) |
| void | setRobotRoll (double roll, double rollStdDev, int _robotId=0) |
| virtual void | setRobotToSensor (jblas::vec const &robotToSensor, int sensorId=0) |
| Set the robotToSensor transformation of sensor sensorId. | |
| const jblas::vec & | robotToSensor (int sensorId=0) const |
| virtual void | setRobotToSensor (jblas::vec const &robotToSensor, jblas::vec const &robotToSensorStdDev, int sensorId=0) |
| Set the robotToSensor transformation along with its uncertainty of sensor sensorId. | |
| virtual void | addEventListener (SlamEventListener &listener) |
| virtual void | removeEventListener (SlamEventListener &listener) |
| bool | hasFeature (unsigned int id, unsigned int _robotId=0) const |
| virtual bool | isFeatureKnown (unsigned int id) const |
| BaseFeature & | getFeature (unsigned int id) |
| BaseFeature const & | getFeature (unsigned int id) const |
| virtual void | removeFeature (unsigned int id) |
| PoseCopy const & | copyCurrentRefPoseToMap (unsigned int id) |
| This method copy the current reference pose to the map, along with the appropriate correlations. | |
| PoseCopy const & | getPoseCopy (unsigned int id) const |
| Return the current estimate of the poseCopy id. | |
| void | removePoseCopy (unsigned int id) |
| Remove poseCopy id. | |
| void | writePoseCopyToFile (unsigned int id, std::string const &dir) |
| Write poseCopy id in a t3d file. | |
| void | writeAllPoseCopyToFile (std::string const &dir) |
| double | getRobotPoseUncertaintyLevel (unsigned int robotId_=0) const |
| void | getRobotPose (jafar::geom::T3DEuler &pose, unsigned int _robotId=0) const |
| void | transform (const geom::T3DEuler &_transform) |
| This function will transform the position of the landmarks, and of the robot with the given transformation. | |
| std::size_t | sizeMap () const |
| double | getMapUncertaintyLevel () const |
| void | beginBrowseFeatures () |
| bool | hasNextFeature () |
| BaseFeature * | nextFeature () |
| BaseFeature * | feature (unsigned int id) |
| virtual void | predict (unsigned int _robotId, jblas::vec const &u) |
| Compute the prediction for the movement of a robot. | |
| BaseRobot * | robot (unsigned int _id) |
| const BaseRobot * | robot (unsigned int) const |
| virtual void | addRobot (BaseRobot *) |
| Add a new BaseRobot in the map. | |
| virtual void | addRobot (BaseRobot *, const jblas::vec &_robotState, const jblas::sym_mat &_robotStateCov) |
| virtual void | processObservations (unsigned int frameIndex_, std::list< Observation * > const &knownObs, std::list< Observation * > const &newObs, unsigned int robotId_=0, int events_=SlamEventListener::ALL) |
| virtual void | processObservations (unsigned int frameIndex_, std::vector< Observation * > const &knownObs, std::vector< Observation * > const &newObs, unsigned int robotId_=0, int events_=SlamEventListener::ALL) |
| template<class SequenceType > | |
| void | processObservations (unsigned int frameIndex_, SequenceType const &allObs, unsigned int robotId_=0, int events_=SlamEventListener::ALL) |
| template<class segmentFeatureObserveModel > | |
| void | computeExtObs (int robotId_, SegmentFeature &segmentFeature_, segmentFeatureObserveModel &obsModel, jblas::vec &zPredExt1, jblas::sym_mat &zPredExt1Cov, jblas::vec &zPredExt2, jblas::sym_mat &zPredExt2Cov) |
| Compute Extremites Observation /. | |
| template<class segmentFeatureObserveModel > | |
| void | computeExtObs (int robotId_, SegmentIDFeature &segmentFeature_, segmentFeatureObserveModel &obsModel, jblas::vec &zPredExt1, jblas::sym_mat &zPredExt1Cov, jblas::vec &zPredExt2, jblas::sym_mat &zPredExt2Cov) |
| template<class segmentFeatureObserveModel > | |
| void | computeExtObs (int robotId_, SegmentAnchorFeature &segmentFeature_, segmentFeatureObserveModel &obsModel, jblas::vec &zPredExt1, jblas::sym_mat &zPredExt1Cov, jblas::vec &zPredExt2, jblas::sym_mat &zPredExt2Cov) |
Static Public Member Functions | |
| static SlamEkf * | mergeMap (const SlamEkf *map1, const SlamEkf *map2, const jblas::vec &map1ToMap2, const jblas::mat &map1ToMap2Cov, const std::map< unsigned int, MergeMapNumber > &_chooseRobotPose) |
Public Attributes | |
| FeaturesMapType | featuresMap |
| Current map of features. | |
| PoseCopyContType | poseCopyCont |
| estimated local frames | |
| RobotsMapType | robotsMap |
| List of robots inside the map. | |
| FeaturesMapType::iterator | browseFeaturesIt |
Protected Types | |
|
typedef std::list < SlamEventListener * > | SlamEventListenersList |
|
typedef std::map< unsigned int, FeatureObserveModel * > | FeatureObserveModelsContType |
Protected Member Functions | |
| virtual void | observeNewFeature (Observation *obs_) |
| This method adds a new feature to the map. | |
| virtual void | observeKnownFeature (Observation *obs_) |
| This method performs observation update to a feature in the map. | |
| void | observeKnownFeature (Observation const &obs, BaseFeature &feature, BaseFeatureObserveModel &model) |
| This method performs observation update to a feature in the map. | |
| void | applyConstraints (BaseFeature &feature) |
| apply constraints of feature | |
| void | fixFeature (BaseFeature &feature) |
| Make feature satisfy a constraint. | |
| void | copyCurrentPoseAt (std::size_t index, int _robotId=0) |
| Copy current robot pose at given map location and size. | |
| void | writePoseCopyToFile (PoseCopy const &pc, std::string const &dir) |
| virtual void | writeLogHeader (jafar::kernel::DataLogger &log) const |
| Implements this method calling repeatidly log methods. | |
| virtual void | writeLogData (jafar::kernel::DataLogger &log) const |
| Implements this method calling repeatidly log methods. | |
| virtual void | writeLogStats (jafar::kernel::DataLogger &log) const |
| write stats at the end of the log | |
| void | logFeature (BaseFeature &f) |
Static Protected Member Functions | |
| static BaseFeature * | featureFactory (unsigned int id, BaseFeatureObserveModel &model) |
| static BaseFeature * | featureFactory (unsigned int id, FeatureModel &model, std::size_t sizeObs, Observation::ObservationType typeObs) |
Protected Attributes | |
| bool | m_deleteSensors |
| unsigned int | currentFrameIndex |
| unsigned int | prevFrameIndex |
| jafar::filter::BlockExtendedKalmanFilter | filter |
| double | mahalanobisDistanceToRemoveLandmark |
| std::size_t | m_sizeRobotState |
| std::size_t | m_sizeRobotPose |
| AbstractMapManager * | mapManager |
| SlamEventListenersList | slamEventListeners |
| bool | enableInitCoordinateFrame |
| FIXME not implemented yet. | |
| FeatureObserveModelsContType | featureObserveModels |
| Observe models for simple features. | |
| class jafar::slam::SlamEkf::Stats | stats |
| geom::T3D * | m_refToRobot |
| relation between the robot frame and the slam (ref) frame | |
| geom::T3D * | m_robotToRef |
| unsigned short int | nbInconsistentUpdates |
| unsigned short int | nbNewLandmarks |
| unsigned short int | nbObservedLandmarks |
| long | updateElapsedTime |
| jafar::kernel::DataLogger * | p_masterLogger |
Private Member Functions | |
| void | initFeatureState (BaseFeature &feature, FeatureObserveModel &observeModel, Observation const &obs) |
| init value of feature state, covariance and cross covariance. | |
| SlamEkf (const SlamEkf &) | |
| SlamEkf & | operator= (const SlamEkf &) |
| template<class SequenceType1 , class SequenceType2 > | |
| void | processObservationsImpl (unsigned int frameIndex_, SequenceType1 const &knownObs, SequenceType2 const &newObs, unsigned int robotId_, int events_) |
Friends | |
| class | DefaultMapManager |
| class | LocalMapManager |
| class | GlobalMapManager |
| std::ostream & | operator<< (std::ostream &s, const SlamEkf &slam_) |
Merge two maps, and creates a new one.
Definition at line 636 of file slamEkf.hpp.
| virtual void jafar::slam::SlamEkf::addRobot | ( | BaseRobot * | ) | [virtual] |
Add a new BaseRobot in the map.
The function will initialize the state of the robot in the filter.
Implements jafar::slam::BaseSlam.
Reimplemented in jafar::slam::BearingOnlySlam.
| void jafar::slam::SlamEkf::computeExtObs | ( | int | robotId_, |
| SegmentFeature & | segmentFeature_, | ||
| segmentFeatureObserveModel & | obsModel, | ||
| jblas::vec & | zPredExt1, | ||
| jblas::sym_mat & | zPredExt1Cov, | ||
| jblas::vec & | zPredExt2, | ||
| jblas::sym_mat & | zPredExt2Cov | ||
| ) | [inline] |
Compute Extremites Observation /.
| _robotId | Robot Identifier / |
| segmentFeature_ | Segment Landmark. CAUTION this function it is only needed in the case of segments. / |
| zPredExt1 | and |
| zPredExt2 | Extremities Observation / |
| zPredExt1Cov | and |
| zPredExt2Cov | Extremities Observation Covariances |
Definition at line 477 of file slamEkf.hpp.
| BaseFeature* jafar::slam::SlamEkf::feature | ( | unsigned int | id | ) |
| static SlamEkf* jafar::slam::SlamEkf::mergeMap | ( | const SlamEkf * | map1, |
| const SlamEkf * | map2, | ||
| const jblas::vec & | map1ToMap2, | ||
| const jblas::mat & | map1ToMap2Cov, | ||
| const std::map< unsigned int, MergeMapNumber > & | _chooseRobotPose | ||
| ) | [static] |
| _chooseRobotPose | a map that indicates the merge which map should be used to select the robot pose |
| virtual void jafar::slam::SlamEkf::observeNewFeature | ( | Observation * | obs_ | ) | [protected, virtual] |
This method adds a new feature to the map.
A new feature can be initialized only with an observation with the same dimension as the state of the feature.
Reimplemented in jafar::slam::BearingOnlySlam.
| virtual void jafar::slam::SlamEkf::predict | ( | unsigned int | _robotId, |
| jblas::vec const & | u | ||
| ) | [virtual] |
Compute the prediction for the movement of a robot.
| _robotId | id of the robot |
| u | command |
Implements jafar::slam::BaseSlam.
Reimplemented in jafar::slam::BearingOnlySlam.
| virtual void jafar::slam::SlamEkf::removeFeature | ( | unsigned int | id | ) | [virtual] |
Implements jafar::slam::BaseSlam.
Reimplemented in jafar::slam::BearingOnlySlam.
| BaseRobot* jafar::slam::SlamEkf::robot | ( | unsigned int | _id | ) |
| const BaseRobot* jafar::slam::SlamEkf::robot | ( | unsigned | int | ) | const |
| void jafar::slam::SlamEkf::setSensor | ( | FeatureObserveModel * | model, |
| int | sensorId = 0 |
||
| ) |
Add a sensor with its feature model.
Enable to deal with multiple sensors.
| std::size_t jafar::slam::SlamEkf::sizeMap | ( | ) | const [inline] |
Definition at line 354 of file slamEkf.hpp.
References featuresMap.
| virtual void jafar::slam::SlamEkf::writeLogData | ( | jafar::kernel::DataLogger & | log | ) | const [protected, virtual] |
Implements this method calling repeatidly log methods.
You should use writeData() or writeDataVector().
Implements jafar::kernel::DataLoggable.
Reimplemented in jafar::slam::BearingOnlySlam.
| virtual void jafar::slam::SlamEkf::writeLogHeader | ( | jafar::kernel::DataLogger & | log | ) | const [protected, virtual] |
Implements this method calling repeatidly log methods.
You should use writeComment(), writeLegend() or writeLegendTokens().
Implements jafar::kernel::DataLoggable.
Reimplemented in jafar::slam::BearingOnlySlam.
| void jafar::slam::SlamEkf::writePoseCopyToFile | ( | unsigned int | id, |
| std::string const & | dir | ||
| ) |
Write poseCopy id in a t3d file.
write in dir/prefix_id.t3d
| Generated on Wed Oct 15 2014 00:37:50 for Jafar by doxygen 1.7.6.1 |

|

