|
Jafar
|
|
Jafar
|
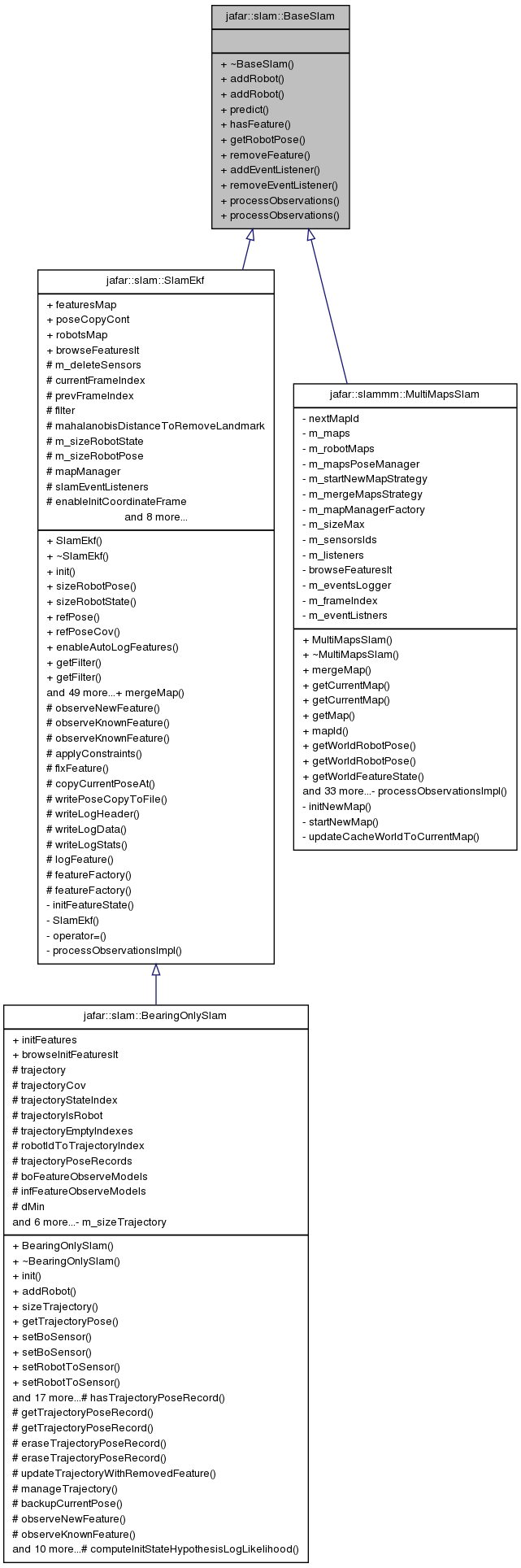
Base class for Slam algorithms that can be used by managers. More...
Base class for Slam algorithms that can be used by managers.
Definition at line 22 of file baseSlam.hpp.
#include <baseSlam.hpp>
Public Member Functions | |
| virtual void | addRobot (BaseRobot *)=0 |
| virtual void | addRobot (BaseRobot *, const jblas::vec &_robotState, const jblas::sym_mat &_robotStateCov)=0 |
| virtual void | predict (unsigned int _robotId, jblas::vec const &u)=0 |
| virtual bool | hasFeature (unsigned int id, unsigned int robotId_=0) const =0 |
| virtual void | getRobotPose (jafar::geom::T3DEuler &pose, unsigned int _robotId=0) const =0 |
| virtual void | removeFeature (unsigned int id)=0 |
| virtual void | addEventListener (slam::SlamEventListener &listener)=0 |
| virtual void | removeEventListener (slam::SlamEventListener &listener)=0 |
| virtual void | processObservations (unsigned int frameIndex_, std::list< Observation * > const &knownObs, std::list< Observation * > const &newObs, unsigned int robotId_=0, int events_=slam::SlamEventListener::ALL)=0 |
| virtual void | processObservations (unsigned int frameIndex_, std::vector< Observation * > const &knownObs, std::vector< Observation * > const &newObs, unsigned int robotId_=0, int events_=slam::SlamEventListener::ALL)=0 |
| Generated on Wed Oct 15 2014 00:37:48 for Jafar by doxygen 1.7.6.1 |

|

