|
Jafar
|
|
Jafar
|
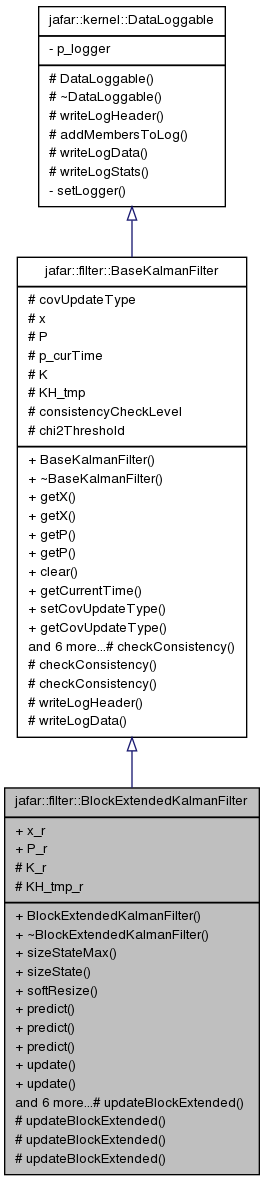
This class implements an extended Kalman filter to be used for example to solve the SLAM problem. More...
This class implements an extended Kalman filter to be used for example to solve the SLAM problem.
The update stage is optimized using the fact that the observation model only apply to two blocks of the state vector, the complexity of this step is reduced to O(n^2) (instead of O(n^3) for the usual implementation). Also the prediction model can be apply only on a given part of the state vector (other states are supposed to be constant). Also the state can be efficiently resized using the softResize() method.
Definition at line 325 of file kalmanFilter.hpp.
#include <kalmanFilter.hpp>
Public Member Functions | |
| BlockExtendedKalmanFilter (std::size_t sizeMax_, std::size_t size_) | |
| std::size_t | sizeStateMax () const |
| virtual std::size_t | sizeState () const |
| void | softResize (std::size_t size_) |
| void | predict (std::size_t index1_, std::size_t index2_, LinearPredictModel const &m_) |
| Prediction over a substate. | |
| void | predict (std::size_t index1_, std::size_t index2_, JacobianBlockPredictModel &m_) |
| Prediction over a substate. | |
| void | predict (std::size_t index1_, std::size_t index2_, JacobianBlockCommandPredictModel &m_, jblas::vec const &u_) |
| Prediction over a substate. | |
| void | update (LinearObserveModel &m_, std::size_t index, const jblas::vec &z_) |
| void | update (JacobianObserveModel &m_, std::size_t index, jblas::vec const &z_) |
| This function computes the observation step. | |
| void | update (JacobianObserveModel &m_, std::size_t index_, jblas::vec_range &x_, jblas::sym_mat_range &P_, jblas::vec const &z_) |
| void | update (BlockObserveModel &m_, std::size_t index1_, std::size_t index2_, jblas::vec_range &x1_, jblas::vec_range &x2_, jblas::sym_mat_range &P1_, jblas::sym_mat_range &P2_, const jblas::vec &z_, jmath::GaussianVector &zPred) |
| void | applyConstraint (JacobianStrongConstraintModel &model, std::size_t index_) |
| void | applyConstraint (JacobianStrongConstraintModel &model, std::size_t index_, jblas::vec_range &x_, jblas::sym_mat_range &P_) |
| double | computeMahalanobisDistance (LinearObserveModel &m_, std::size_t index_, const jblas::vec &z_) |
| double | computeMahalanobisDistance (LinearObserveModel &m_, const jblas::vec_range &x_, const jblas::sym_mat_range &P_, const jblas::vec &z_) |
| double | computeMahalanobisDistance (BlockObserveModel &m_, std::size_t index1_, std::size_t index2_, const jblas::vec_range &x1_, const jblas::vec_range &x2_, const jblas::sym_mat_range &P1_, const jblas::sym_mat_range &P2_, const jblas::vec &z_) |
Public Attributes | |
| jblas::vec_range * | x_r |
| jblas::sym_mat_range * | P_r |
Protected Member Functions | |
| void | updateBlockExtended (std::size_t index_, const jblas::sym_mat_range &P_, const jblas::sym_mat_range &Pcol_, const jblas::mat_range &H_, double y_, double R_) |
| update one block. | |
| void | updateBlockExtended (std::size_t index_, const jblas::sym_mat_range &P_, const jblas::sym_mat_range &Pcol_, const jblas::mat &H_, jblas::vec const &y, jblas::sym_mat const &R_) |
| void | updateBlockExtended (std::size_t index1_, std::size_t index2_, const jblas::sym_mat_range &P1_, const jblas::sym_mat_range &P2_, const jblas::sym_mat_range &P12_, const jblas::sym_mat_range &P21_, const jblas::sym_mat_range &Pcol1_, const jblas::sym_mat_range &Pcol2_, const jblas::mat_range &H1_, const jblas::mat_range &H2_, double y_, double R_) |
| update two blocks. | |
| void | updateBlockExtended (std::size_t index1_, std::size_t index2_, const jblas::sym_mat_range &P1_, const jblas::sym_mat_range &P2_, const jblas::sym_mat_range &P12_, const jblas::sym_mat_range &P21_, const jblas::sym_mat_range &Pcol1_, const jblas::sym_mat_range &Pcol2_, const jblas::mat &H1_, const jblas::mat &H2_, jblas::vec const &y_, jblas::sym_mat const &R_) |
Protected Attributes | |
| jblas::mat_range * | K_r |
| jblas::mat_range * | KH_tmp_r |
Friends | |
| std::ostream & | operator<< (std::ostream &s, const BlockExtendedKalmanFilter &f_) |
| double jafar::filter::BlockExtendedKalmanFilter::computeMahalanobisDistance | ( | LinearObserveModel & | m_, |
| std::size_t | index_, | ||
| const jblas::vec & | z_ | ||
| ) |
Table of the values of the mahalanobis distance and associated probability (area) for diffenrent dimensions (df). df\area .995 .990 .975 .950 .900 .750 .500 .250 .100 .050 .025 .010 .005 1 0.00004 0.00016 0.00098 0.00393 0.01579 0.10153 0.45494 1.32330 2.70554 3.84146 5.02389 6.63490 7.87944 2 0.01003 0.02010 0.05064 0.10259 0.21072 0.57536 1.38629 2.77259 4.60517 5.99146 7.37776 9.21034 10.59663 3 0.07172 0.11483 0.21580 0.35185 0.58437 1.21253 2.36597 4.10834 6.25139 7.81473 9.34840 11.34487 12.83816 4 0.20699 0.2971 0.48442 0.71072 1.06362 1.92256 3.35669 5.38527 7.77944 9.48773 11.14329 13.27670 14.86026 5 0.41174 0.55430 0.83121 1.14548 1.61031 2.67460 4.35146 6.62568 9.23636 11.07050 12.83250 15.08627 16.74960 6 0.67573 0.87209 1.23734 1.63538 2.20413 3.45460 5.34812 7.84080 10.64464 12.59159 14.44938 16.81189 18.54758 7 0.98926 1.23904 1.68987 2.16735 2.83311 4.25485 6.34581 9.03715 12.01704 14.06714 16.01276 18.47531 20.27774 8 1.34441 1.64650 2.17973 2.73264 3.48954 5.07064 7.34412 10.21885 13.36157 15.50731 17.53455 20.09024 21.95495 9 1.73493 2.08790 2.70039 3.32511 4.16816 5.89883 8.34283 11.38875 14.68366 16.91898 19.02277 21.66599 23.58935 10 2.15586 2.55821 3.24697 3.94030 4.86518 6.73720 9.34182 12.54886 15.98718 18.30704 20.48318 23.20925 25.18818 (values found on http://www.statsoft.com/textbook/sttable.html)
| void jafar::filter::BlockExtendedKalmanFilter::predict | ( | std::size_t | index1_, |
| std::size_t | index2_, | ||
| LinearPredictModel const & | m_ | ||
| ) |
Prediction over a substate.
| void jafar::filter::BlockExtendedKalmanFilter::predict | ( | std::size_t | index1_, |
| std::size_t | index2_, | ||
| JacobianBlockPredictModel & | m_ | ||
| ) |
Prediction over a substate.
| void jafar::filter::BlockExtendedKalmanFilter::predict | ( | std::size_t | index1_, |
| std::size_t | index2_, | ||
| JacobianBlockCommandPredictModel & | m_, | ||
| jblas::vec const & | u_ | ||
| ) |
Prediction over a substate.
| virtual std::size_t jafar::filter::BlockExtendedKalmanFilter::sizeState | ( | ) | const [inline, virtual] |
Reimplemented from jafar::filter::BaseKalmanFilter.
Definition at line 337 of file kalmanFilter.hpp.
| void jafar::filter::BlockExtendedKalmanFilter::update | ( | JacobianObserveModel & | m_, |
| std::size_t | index, | ||
| jblas::vec const & | z_ | ||
| ) |
This function computes the observation step.
| m_ | observation model |
| z_ | observation |
| Generated on Wed Oct 15 2014 00:37:36 for Jafar by doxygen 1.7.6.1 |

|

