|
Jafar
|
|
Jafar
|
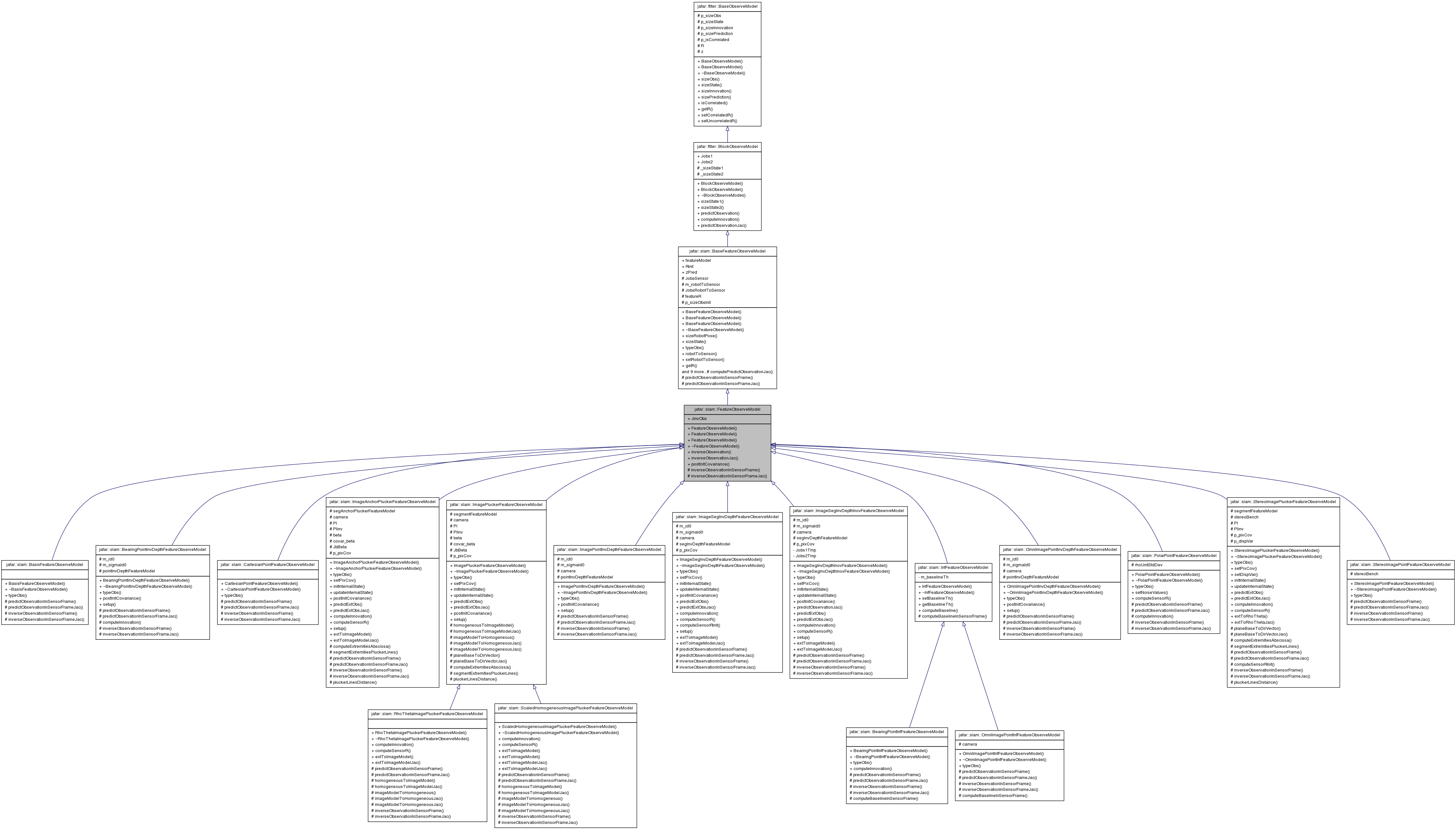
Fully observable feature observe model. More...
Fully observable feature observe model.
It takes into accout sensor frame in inverse observation model.
Definition at line 251 of file featureModel.hpp.
#include <featureModel.hpp>
Public Member Functions | |
| FeatureObserveModel (FeatureModel &model, std::size_t sizeObs_) | |
| FeatureObserveModel (FeatureModel &model, std::size_t sizeObs_, std::size_t sizeObsInit_) | |
| FeatureObserveModel (FeatureModel &model, std::size_t sizeObs_, std::size_t sizeObsInit_, std::size_t sizeInnovation_, std::size_t sizePrediction_) | |
| jblas::vec | inverseObservation (Observation const &obs_) |
| Takes into accout sensor frame and delegate initialisation in sensor frame to inverseObservationInSensorFrame() | |
| void | inverseObservationJac (Observation const &obs_) |
| virtual void | postInitCovariance (jblas::sym_mat_range &P, jblas::mat const &Jfeature) |
Public Attributes | |
| jblas::mat | JinvObs |
| Jacobian of the inverse observe function. | |
Protected Member Functions | |
| virtual jblas::vec | inverseObservationInSensorFrame (Observation const &obs_)=0 |
| virtual void | inverseObservationInSensorFrameJac (Observation const &obs_)=0 |
| jacobian of inverseObservationInSensorFrame() | |
| virtual jblas::vec jafar::slam::FeatureObserveModel::inverseObservationInSensorFrame | ( | Observation const & | obs_ | ) | [protected, pure virtual] |
inverse observation function in sensor frame, to be defined by user.
Implemented in jafar::slam::StereoImagePluckerFeatureObserveModel, jafar::slam::ScaledHomogeneousImagePluckerFeatureObserveModel, jafar::slam::RhoThetaImagePluckerFeatureObserveModel, jafar::slam::StereoImagePointFeatureObserveModel, jafar::slam::ImageAnchorPluckerFeatureObserveModel, jafar::slam::ImagePointInvDepthFeatureObserveModel, jafar::slam::ImageSegInvDepthFeatureObserveModel, jafar::slam::OmniImagePointInvDepthFeatureObserveModel, jafar::slam::PolarPointFeatureObserveModel, jafar::slam::OmniImagePointInfFeatureObserveModel, jafar::slam::BearingPointInvDepthFeatureObserveModel, jafar::slam::CartesianPointFeatureObserveModel, jafar::slam::BearingPointInfFeatureObserveModel, jafar::slam::ImageSegInvDepthInovFeatureObserveModel, and jafar::slam::BasisFeatureObserveModel.
Jacobian of the inverse observe function.
Definition at line 260 of file featureModel.hpp.
| Generated on Wed Oct 15 2014 00:37:48 for Jafar by doxygen 1.7.6.1 |

|

