|
Jafar
|
|
Jafar
|
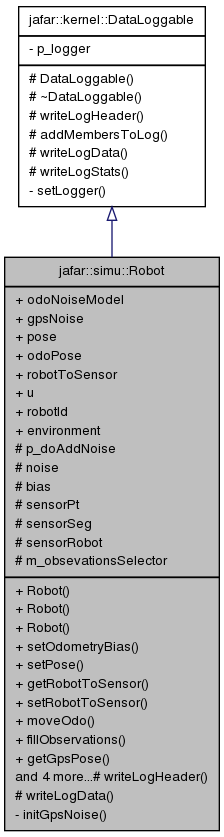
A simple simulated robot with one sensor. More...
#include <robot.hpp>
Public Types | |
|
typedef std::list < jafar::slam::Observation * > | SequenceObs |
Public Member Functions | |
| Robot (jafar::slam::OdoNoiseModel const &odoNoiseModel_, SensorPoint *sensor_, bool doAddNoise=false, unsigned int randomSeed=1, double noiseFactor=1.0, unsigned int _robotId=0) | |
| Robot (jafar::slam::OdoNoiseModel const &odoNoiseModel_, SensorSegmentImage *sensor_, bool doAddNoise=false, unsigned int randomSeed=1, double noiseFactor=1.0, unsigned int _robotId=0) | |
| Robot (jafar::slam::OdoNoiseModel const &odoNoiseModel_, SensorPoint *sensor_, SensorSegmentImage *segmentSensor_, bool doAddNoise=false, unsigned int randomSeed=1, double noiseFactor=1.0, unsigned int _robotId=0) | |
| void | setOdometryBias (jblas::vec const &bias_) |
| void | setPose (const jblas::vec &pose_) |
| jblas::vec const & | getRobotToSensor () const |
| void | setRobotToSensor (const jblas::vec &robotToSensor_) |
| void | moveOdo (double v, double w, double dt) |
| void | fillObservations (SequenceObs &seqObs) |
| void | getGpsPose (jafar::geom::T3DEuler &pose) |
| unsigned int const | getRobotId () |
| Get robotId. | |
| void | setSensorRobot (SensorRobot *_sensorRobot) |
| Set the sensor used to observe other robots. | |
| SensorRobot * | getSensorRobot () |
| Get the sensor used to observe other robots. | |
| void | setSegmentObservationsSelector (jafar::slam::SegmentObservationsSelector *_observationsSelector) |
| jafar::slam::SegmentObservationsSelector * | getSegmentObservationsSelector () |
Public Attributes | |
| jafar::slam::OdoNoiseModel const & | odoNoiseModel |
| jblas::sym_mat | gpsNoise |
| jafar::geom::T3DEuler | pose |
| The true position of the robot [x, y, z, yaw, pitch, roll]. | |
| jafar::geom::T3DEuler | odoPose |
| The position of the robot obtained by odometry integration [x, y, z, yaw, pitch, roll]. | |
| jafar::geom::T3DEuler | robotToSensor |
| jblas::vec | u |
| Last odometry read [v,w]. | |
| unsigned int | robotId |
| Id of the robot in the slam. | |
| Environment * | environment |
Protected Member Functions | |
| void | writeLogHeader (kernel::DataLogger &log) const |
| Implements this method calling repeatidly log methods. | |
| void | writeLogData (kernel::DataLogger &log) const |
| Implements this method calling repeatidly log methods. | |
Protected Attributes | |
| bool | p_doAddNoise |
| jafar::jmath::NormalDistribution | noise |
| odometry noise | |
| jblas::vec | bias |
| odometry bias | |
| SensorPoint * | sensorPt |
| The sensor used by the robot. | |
| SensorSegmentImage * | sensorSeg |
| SensorRobot * | sensorRobot |
| jafar::slam::SegmentObservationsSelector * | m_obsevationsSelector |
Private Member Functions | |
| void | initGpsNoise () |
Friends | |
| std::ostream & | operator<< (std::ostream &s, const Robot &r_) |
| void jafar::simu::Robot::writeLogData | ( | kernel::DataLogger & | log | ) | const [protected, virtual] |
Implements this method calling repeatidly log methods.
You should use writeData() or writeDataVector().
Implements jafar::kernel::DataLoggable.
| void jafar::simu::Robot::writeLogHeader | ( | kernel::DataLogger & | log | ) | const [protected, virtual] |
Implements this method calling repeatidly log methods.
You should use writeComment(), writeLegend() or writeLegendTokens().
Implements jafar::kernel::DataLoggable.
| Generated on Wed Oct 15 2014 00:37:48 for Jafar by doxygen 1.7.6.1 |

|

