|
Jafar
|
|
Jafar
|
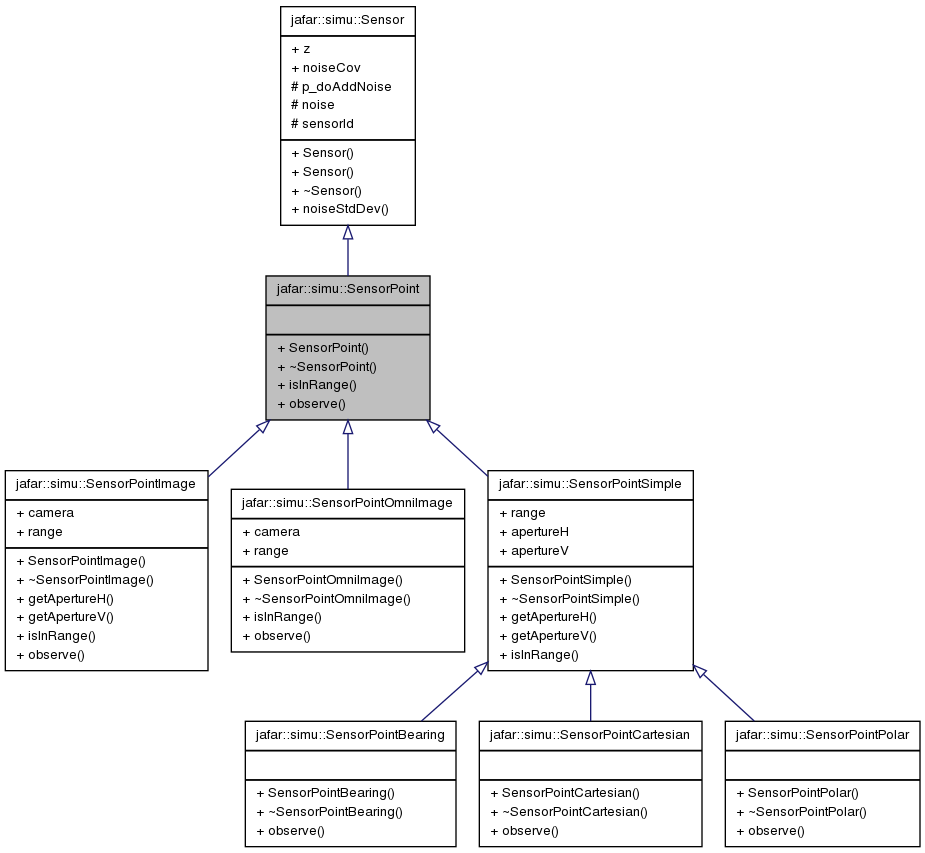
Base class for points sensors. More...
Base class for points sensors.
Definition at line 90 of file sensor.hpp.
#include <sensor.hpp>
Public Member Functions | |
| SensorPoint (const jblas::vec &noiseCov_, bool doAddNoise=false, unsigned int randomSeed=1, double noiseFactor=1.0, unsigned int sensorId_=0) | |
| virtual bool | isInRange (const jblas::vec &sensor_, const Point &feature_) const =0 |
| virtual jafar::slam::Observation * | observe (const jblas::vec &sensor_, const Point &feature_, unsigned int _robotId)=0 |
| Generated on Wed Oct 15 2014 00:37:48 for Jafar by doxygen 1.7.6.1 |

|

