|
Jafar
|
|
Jafar
|
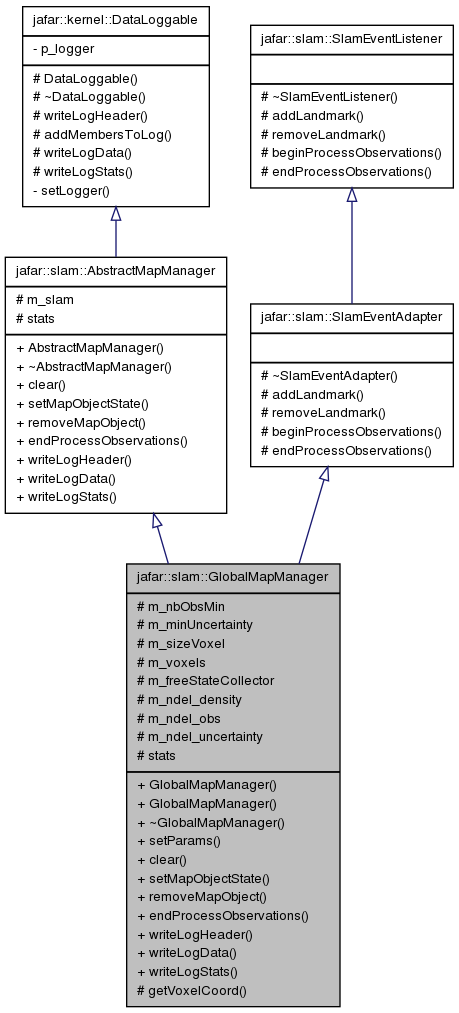
Global (long term) map manager. More...
Global (long term) map manager.
It uses three criterias to limit the number of landmarks:
The map manager garbage-collects subvectors of the filter state and use them to add new landmarks
Definition at line 157 of file mapManager.hpp.
#include <mapManager.hpp>
Classes | |
| class | Stats |
Public Member Functions | |
| GlobalMapManager (SlamEkf &slam_, double sizeVoxel_, unsigned int nbObsMin, double minUncertainty) | |
| GlobalMapManager (SlamEkf &slam_) | |
| void | setParams (double sizeVoxel=1.0, unsigned int nbObsMin=5, double minUncertainty=0.01) |
| void | clear () |
| void | setMapObjectState (AbstractMapObject &mapObj) |
| void | removeMapObject (AbstractMapObject const &mapObj) |
| virtual void | endProcessObservations (unsigned int robotId_) |
| virtual void | writeLogHeader (jafar::kernel::DataLogger &log) const |
| Implements this method calling repeatidly log methods. | |
| virtual void | writeLogData (jafar::kernel::DataLogger &log) const |
| Implements this method calling repeatidly log methods. | |
| virtual void | writeLogStats (jafar::kernel::DataLogger &log) const |
| write stats at the end of the log | |
Protected Types | |
|
typedef std::map < details::VoxelCoord, BaseFeature * > | VoxelsType |
Protected Member Functions | |
| details::VoxelCoord | getVoxelCoord (BaseFeature const &f) |
Protected Attributes | |
| unsigned int | m_nbObsMin |
| minimum number of observations for a landmark to be kept in the map | |
| double | m_minUncertainty |
| uncertainty | |
| double | m_sizeVoxel |
| world decomposition in voxels | |
| VoxelsType | m_voxels |
| FreeStateCollector | m_freeStateCollector |
| garbage collector | |
| int | m_ndel_density |
| int | m_ndel_obs |
| int | m_ndel_uncertainty |
|
class jafar::slam::GlobalMapManager::Stats | stats |
| void jafar::slam::GlobalMapManager::setParams | ( | double | sizeVoxel = 1.0, |
| unsigned int | nbObsMin = 5, |
||
| double | minUncertainty = 0.01 |
||
| ) |
| sizeVoxel | the size of voxels |
| nbObsMin | defines the minimal number of observations. If the feature is observed less than nbObsMin, it is removed. If it is observed less than 2*nbObsMin it is removed if uncertainty is greater than minUncertainty. If it is observed more than 2*nbObsMin it is kept. |
| minUncertainty | minimal uncertainty on the maximal eigen value, a feature below that threshold will be rejected if there isn't enough observations |
| virtual void jafar::slam::GlobalMapManager::writeLogData | ( | jafar::kernel::DataLogger & | log | ) | const [virtual] |
Implements this method calling repeatidly log methods.
You should use writeData() or writeDataVector().
Reimplemented from jafar::slam::AbstractMapManager.
| virtual void jafar::slam::GlobalMapManager::writeLogHeader | ( | jafar::kernel::DataLogger & | log | ) | const [virtual] |
Implements this method calling repeatidly log methods.
You should use writeComment(), writeLegend() or writeLegendTokens().
Reimplemented from jafar::slam::AbstractMapManager.
| Generated on Wed Oct 15 2014 00:37:49 for Jafar by doxygen 1.7.6.1 |

|

