|
Jafar
|
|
Jafar
|
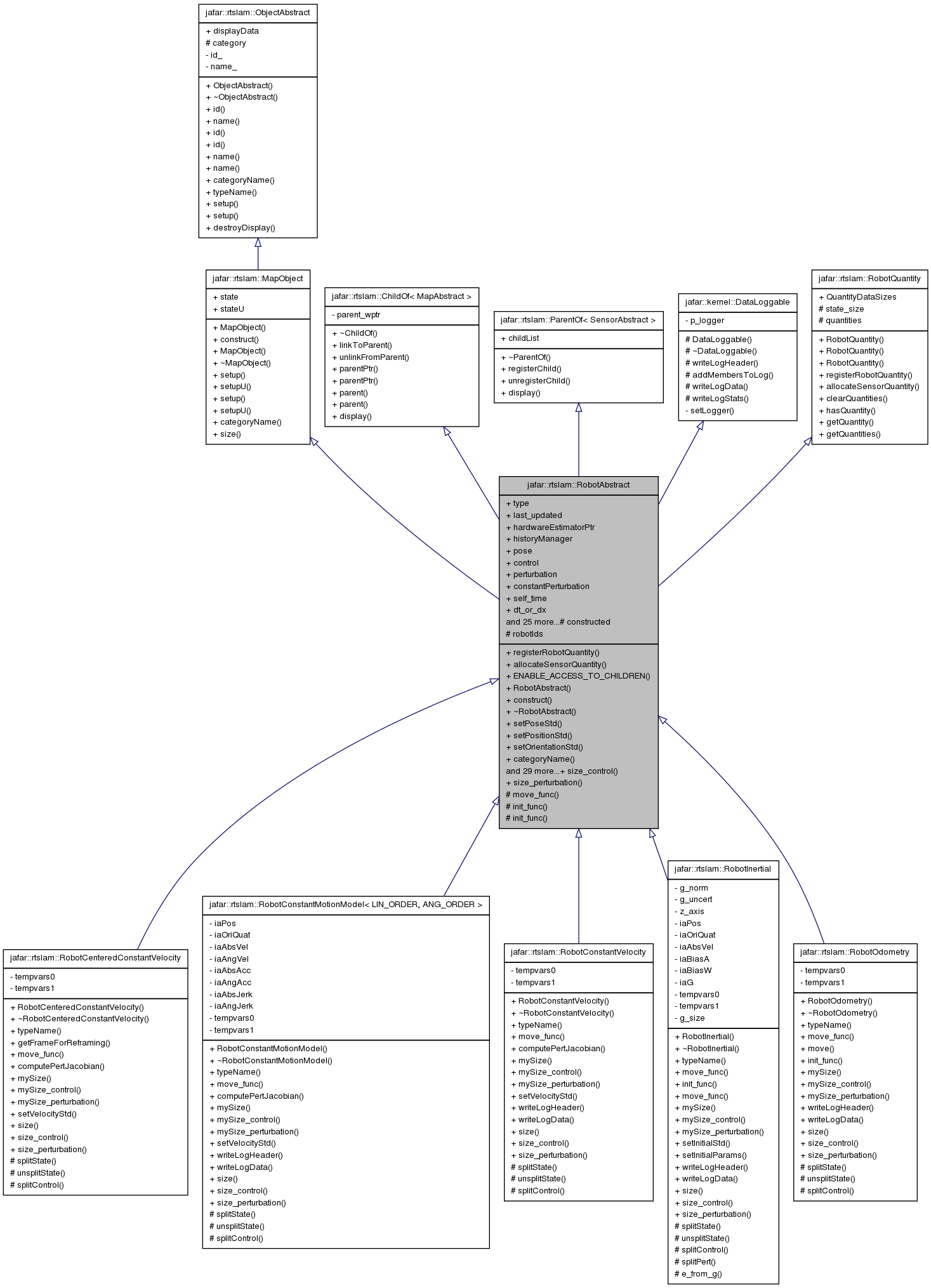
Base class for all robots defined in the module rtslam. More...
Base class for all robots defined in the module rtslam.
Definition at line 93 of file robotAbstract.hpp.
#include <robotAbstract.hpp>
Public Types | |
| enum | type_enum { ODOMETRY, CONSTANT_VELOCITY, CONSTANT_MOTION_MODEL, INERTIAL, CENTERED_CONSTANT_VELOCITY } |
Public Member Functions | |
| virtual bool | registerRobotQuantity (Quantity quantity) |
| robot or environment quantities to be estimated, that are shared by sensors and predefined | |
| virtual ublas::range | allocateSensorQuantity (size_t size) |
| sensor quantities to be estimated (biases, ...) that are defined by the sensor | |
| ENABLE_ACCESS_TO_CHILDREN (SensorAbstract, Sensor, sensor) | |
| RobotAbstract (const map_ptr_t &_mapPtr) | |
| void | construct (const map_ptr_t &_mapPtr, const size_t _size_state, const size_t _size_control, const size_t _size_pert) |
| Remote constructor from remote map and size of state and control vectors. | |
| void | setPoseStd (double x, double y, double z, double roll, double pitch, double yaw, double xStd, double yStd, double zStd, double rollStd, double pitchStd, double yawStd, bool degrees=false) |
| void | setPositionStd (double x, double y, double z, double xStd, double yStd, double zStd) |
| void | setOrientationStd (double roll, double pitch, double yaw, double rollStd, double pitchStd, double yawStd, bool degrees=false) |
| virtual std::string | categoryName () const |
| void | setId () |
| void | setRobotPose (jblas::vec6 const &pose_euler, bool degrees=false) |
| Set the pose of the true robot in the slam robot frame The Slam robot frame is the IMU frame for inertial slam, and as defined by the sensorPoses otherwise. | |
| void | setInitialPose (double x, double y, double z, double roll, double pitch, double yaw, double xStd, double yStd, double zStd, double rollStd, double pitchStd, double yawStd, bool degrees=false) |
| Set the initial pose of the real robot in the exported frame. | |
| void | setOrigin (double x, double y, double z) |
| Set the origin of the exported frame in the absolute frame used by absolute sensors (ie GPS) If you don't use if the first absolute pos sensor reading will compute it and set it, which is fine if this happens at the very beginning, but if it happens later the drift between the start position and when it happens won't be corrected. | |
| void | setInitialOrientation (double roll, double pitch, double yaw, double rollStd, double pitchStd, double yawStd, bool degrees=false) |
| Set the absolute real robot initial orientation. | |
| void | getCurrentPose (double time, jblas::vec &x, jblas::sym_mat &P) |
| Get the absolute real robot current full pose, in euler roll/pitch/yaw, at the given time (must be roughly current time or a little bit in the future, cannot be before last sensor integration) | |
| template<class VEC , class SYM_MAT > | |
| void | slamPoseToRobotPose (VEC &slam_x, SYM_MAT &slam_P, jblas::vec &robot_x, jblas::sym_mat &robot_P) const |
| return pose and uncertainty of the robot frame (and normalizes slam's q) | |
| virtual size_t | mySize ()=0 |
| virtual size_t | mySize_control ()=0 |
| virtual size_t | mySize_perturbation ()=0 |
| void | set_control (const vec &c) |
| void | set_perturbation (const Perturbation &_pert) |
| void | setHardwareEstimator (hardware::hardware_sensorprop_ptr_t hardwareEstimatorPtr_) |
| void | init (const vec &_u, const vec &_U) |
| Initialize the state, affect SLAM filter. | |
| void | init (const vec &_u) |
| void | move () |
| Move one step ahead, affect SLAM filter. | |
| void | move (const vec &_u) |
| Move one step ahead, affect SLAM filter. | |
| bool | computeControls (double time1, double time2, jblas::mat &controls, bool release) const |
| virtual bool | move (double time) |
| void | move_extrapolate () |
| Move without changing the state, for extrapolation Thread safe. | |
| void | move_extrapolate (double time) |
| void | reinit_extrapolate () |
| void | move_fake (double time) |
| move without moving (without doing slam), just to release the data | |
| void | computeStatePerturbation () |
| Compute robot process noise Q in state space. | |
| void | computeStatePerturbation_extrapol () |
| void | applyConstraints () |
| virtual void | writeLogHeader (kernel::DataLogger &log) const |
| Implements this method calling repeatidly log methods. | |
| virtual void | writeLogData (kernel::DataLogger &log) const |
| Implements this method calling repeatidly log methods. | |
| void | stopDumping () |
| void | setHistoryManager (history_manager_ptr_t hm) |
Static Public Member Functions | |
| static size_t | size_control () |
| static size_t | size_perturbation () |
Public Attributes | |
| type_enum | type |
| sensor_ptr_t | last_updated |
| hardware::hardware_sensorprop_ptr_t | hardwareEstimatorPtr |
| history_manager_ptr_t | historyManager |
| Gaussian | pose |
| Robot Gaussian pose. | |
| vec | control |
| Control vector. | |
| Perturbation | perturbation |
| Perturbation Gaussian vector. | |
| bool | constantPerturbation |
| Constant perturbation flag. | |
| kernel::Timestamp | self_time |
| Current estimation time. | |
| double | dt_or_dx |
| Sampling time or any other relevant increment (e.g. odometry is not time-driven but distance-driven) | |
| jblas::mat | controls |
| jblas::mat | XNEW_x |
| Jacobian wrt state. | |
| jblas::mat | XNEW_pert |
| Jacobian wrt perturbation. | |
| jblas::sym_mat | Q |
| Process noise covariances matrix in state space, Q = XNEW_pert * perturbation.P * trans(XNEW_pert);. | |
| jblas::vec | robot_pose |
| the pose of the true robot in the slam robot frame, for exported position | |
| jblas::vec | start_pos_export |
| start position of the robot in the exported frame | |
| jblas::vec | start_pos_abs |
| start position of the robot in the absolute frame, ie the frame of absolute sensors such as GPS (UTM) | |
| bool | is_start_pos_abs_init |
| is start_pos_abs initialized? | |
| boost::mutex | mutex_extrapol |
| bool | extrapol_up_to_date |
| double | self_time_extrapol |
| double | self_time_extrapol_init |
| double | self_time_extrapol_inc |
| jblas::vec | state_extrapol_x |
| jblas::vec | state_extrapol_x_init |
| jblas::vec | state_extrapol_x_inc |
| jblas::sym_mat | state_extrapol_P |
| jblas::sym_mat | state_extrapol_P_init |
| jblas::sym_mat | state_extrapol_P_inc |
| vec | control_extrapol |
| Perturbation | perturbation_extrapol |
| double | dt_or_dx_extrapol |
| jblas::mat | controls_extrapol |
| jblas::mat | XNEW_x_extrapol |
| jblas::mat | XNEW_pert_extrapol |
| jblas::sym_mat | Q_extrapol |
Protected Member Functions | |
| virtual void | move_func (const vec &_x, const vec &_u, const vec &_n, const double _dt, vec &_xnew, mat &_XNEW_x, mat &_XNEW_pert, unsigned tempSet=0) const =0 |
| Move one step ahead. | |
| virtual void | init_func (const vec &_x, const vec &_u, const vec &_U, vec &_xnew) |
| Initialize the robot state with the average previous values of control. | |
| virtual void | init_func (const vec &_x, const vec &_u, vec &_xnew) |
Protected Attributes | |
| bool | constructed |
Static Protected Attributes | |
| static IdFactory | robotIds |
Friends | |
| ostream & | operator<< (ostream &s, RobotAbstract const &rob) |
Compute robot process noise Q in state space.
This function is called by move() at each iteration if constantPerturbation is false. It performs the operation:
where XNEW_pert and perturbation.P() must have been already computed.
| void jafar::rtslam::RobotAbstract::construct | ( | const map_ptr_t & | _mapPtr, |
| const size_t | _size_state, | ||
| const size_t | _size_control, | ||
| const size_t | _size_pert | ||
| ) |
Remote constructor from remote map and size of state and control vectors.
| _mapPtr | a pointer to the map. |
| _size_state | the size of the robot state vector |
| _size_control | the size of the control vector |
| _size_pert | the size of the perturbation vector |
Referenced by allocateSensorQuantity(), and registerRobotQuantity().
| virtual void jafar::rtslam::RobotAbstract::init_func | ( | const vec & | _x, |
| const vec & | _u, | ||
| const vec & | _U, | ||
| vec & | _xnew | ||
| ) | [inline, protected, virtual] |
Initialize the robot state with the average previous values of control.
You may optionnaly implement this function in derived classes.
This function can initialize differently the robot state, given the average control input on a past period of time, if possible.
Reimplemented in jafar::rtslam::RobotInertial.
Definition at line 445 of file robotAbstract.hpp.
Referenced by init().
| void jafar::rtslam::RobotAbstract::move | ( | ) |
Move one step ahead, affect SLAM filter.
This function updates the full state and covariances matrix of the robot plus the cross-variances with all other map objects.
Referenced by move().
| void jafar::rtslam::RobotAbstract::move | ( | const vec & | _u | ) | [inline] |
Move one step ahead, affect SLAM filter.
This function updates the full state and covariances matrix of the robot plus the cross-variances with all other map objects.
Definition at line 358 of file robotAbstract.hpp.
References JFR_ASSERT, and move().
| virtual void jafar::rtslam::RobotAbstract::move_func | ( | const vec & | _x, |
| const vec & | _u, | ||
| const vec & | _n, | ||
| const double | _dt, | ||
| vec & | _xnew, | ||
| mat & | _XNEW_x, | ||
| mat & | _XNEW_pert, | ||
| unsigned | tempSet = 0 |
||
| ) | const [protected, pure virtual] |
Move one step ahead.
Implement this function in every derived class.
This function predicts the robot state one step of length _dt ahead in time, according to the current state _x, the control input _u and the time interval _dt. It computes the new state and the convenient Jacobian matrices.
In clase the flag constantPerturbation is set to true, the matrix _XNEW_pert is not computed.
| _x | the current state vector |
| _u | the control vector |
| _n | the perturbation vector |
| _dt | the time interval |
| _xnew | the new state |
| _XNEW_x | the Jacobian of _xnew wrt _x |
| _XNEW_pert | the Jacobian of _xnew wrt _n |
| tempSet | the id of the set of temporary variables that must be used (stored in the class) |
Implemented in jafar::rtslam::RobotInertial, jafar::rtslam::RobotConstantMotionModel< LIN_ORDER, ANG_ORDER >, jafar::rtslam::RobotConstantVelocity, jafar::rtslam::RobotOdometry, and jafar::rtslam::RobotCenteredConstantVelocity.
| virtual void jafar::rtslam::RobotAbstract::writeLogData | ( | kernel::DataLogger & | log | ) | const [virtual] |
Implements this method calling repeatidly log methods.
You should use writeData() or writeDataVector().
Implements jafar::kernel::DataLoggable.
Reimplemented in jafar::rtslam::RobotInertial, jafar::rtslam::RobotConstantMotionModel< LIN_ORDER, ANG_ORDER >, jafar::rtslam::RobotConstantVelocity, and jafar::rtslam::RobotOdometry.
| virtual void jafar::rtslam::RobotAbstract::writeLogHeader | ( | kernel::DataLogger & | log | ) | const [virtual] |
Implements this method calling repeatidly log methods.
You should use writeComment(), writeLegend() or writeLegendTokens().
Implements jafar::kernel::DataLoggable.
Reimplemented in jafar::rtslam::RobotInertial, jafar::rtslam::RobotConstantMotionModel< LIN_ORDER, ANG_ORDER >, jafar::rtslam::RobotConstantVelocity, and jafar::rtslam::RobotOdometry.
Constant perturbation flag.
Flag for indicating that the state perturbation Q is constant and should not be computed at each iteration.
In case this flag wants to be set to true , the user must consider computing the constant Q immediately after construction time. This can be done in three ways:
In any of the above cases, call your setup() function immediately after the constructor.
Definition at line 194 of file robotAbstract.hpp.
| Generated on Wed Oct 15 2014 00:37:46 for Jafar by doxygen 1.7.6.1 |

|

