|
Jafar
|
|
Jafar
|
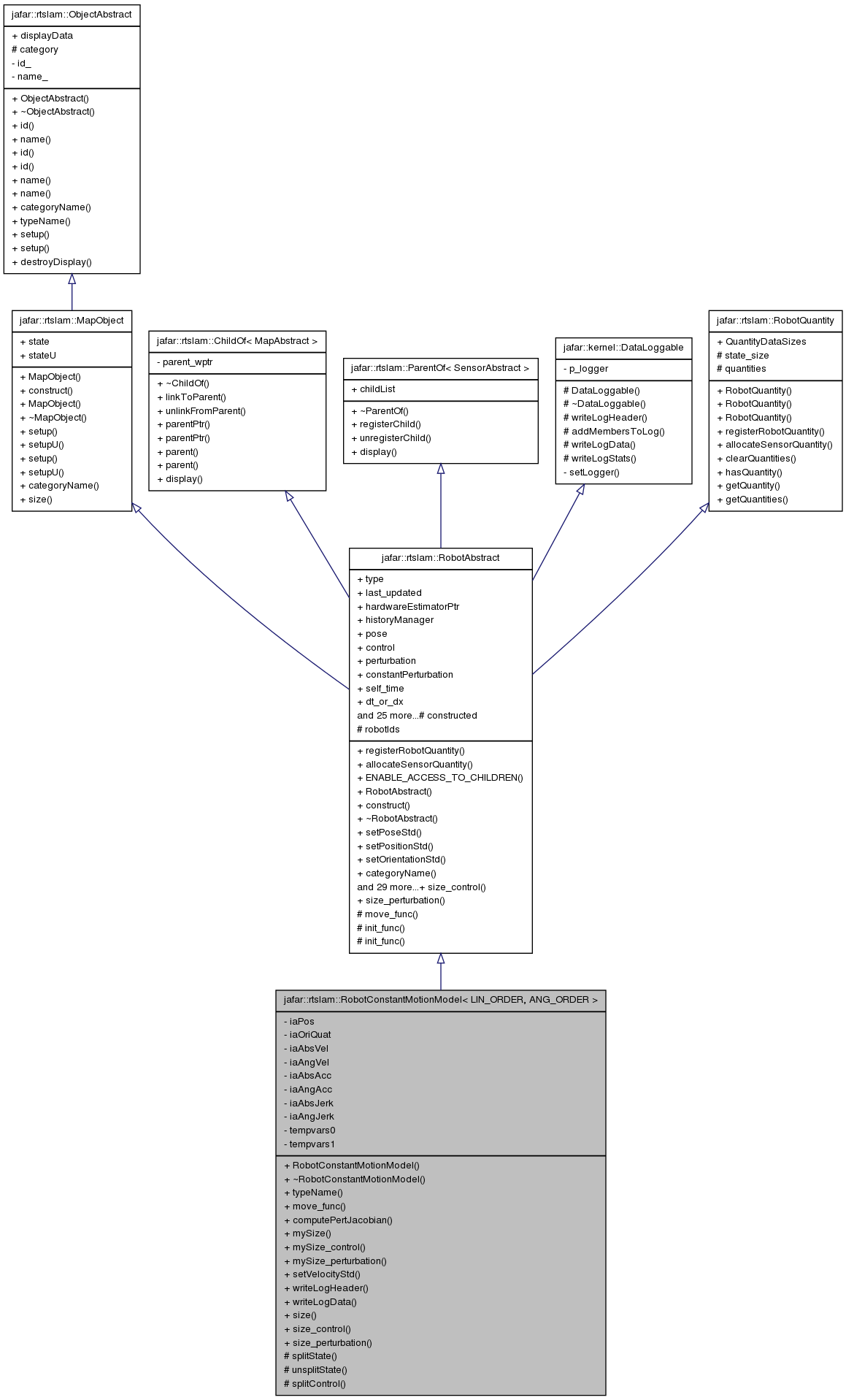
Constant velocity model robot class. More...
Constant velocity model robot class.
The SLAM origin is the camera origin.
This class implements a rigid frame in 3D moving with a constant position/velocity/acceleration/jerk motion model. This model is the following:
where vi and wi are linear and angular velocity random impulses, and ** is the quaternion product.
This model is embedded into the system variables as follows:
Definition at line 61 of file robotConstantMotionModel.hpp.
#include <robotConstantMotionModel.hpp>
Classes | |
| struct | TempVariables |
Public Member Functions | |
| RobotConstantMotionModel (const map_ptr_t &_mapPtr) | |
| Remote constructor from remote map. | |
| virtual std::string | typeName () const |
| void | move_func (const vec &_x, const vec &_u, const vec &_n, const double _dt, vec &_xnew, mat &_XNEW_x, mat &_XNEW_pert, unsigned tempSet=0) const |
| Move one step ahead. | |
| void | computePertJacobian () |
| virtual size_t | mySize () |
| virtual size_t | mySize_control () |
| virtual size_t | mySize_perturbation () |
| void | setVelocityStd (double velLinStd, double velAngStd) |
| virtual void | writeLogHeader (kernel::DataLogger &log) const |
| Implements this method calling repeatidly log methods. | |
| virtual void | writeLogData (kernel::DataLogger &log) const |
| Implements this method calling repeatidly log methods. | |
Static Public Member Functions | |
| static size_t | size () |
| static size_t | size_control () |
| static size_t | size_perturbation () |
Protected Member Functions | |
| template<class Vx , class Vp , class Vq , class Vv , class Vw , class Vva , class Vwa , class Vvj , class Vwj > | |
| void | splitState (const Vx x, Vp &p, Vq &q, Vv &v, Vw &w, Vva &va, Vwa &wa, Vvj &vj, Vwj &wj) const |
| Split state vector. | |
| template<class Vp , class Vq , class Vv , class Vw , class Vva , class Vwa , class Vvj , class Vwj , class Vx > | |
| void | unsplitState (const Vp &p, const Vq &q, const Vv &v, const Vw &w, const Vva &va, const Vwa &wa, const Vvj &vj, const Vwj &wj, Vx &x) const |
| Compose state vector. | |
| template<class Vu , class V > | |
| void | splitControl (const Vu &u, V &vi, V &wi) const |
| Split control vector. | |
Private Attributes | |
| ublas::range | iaPos |
| ublas::range | iaOriQuat |
| ublas::range | iaAbsVel |
| ublas::range | iaAngVel |
| ublas::range | iaAbsAcc |
| ublas::range | iaAngAcc |
| ublas::range | iaAbsJerk |
| ublas::range | iaAngJerk |
| TempVariables | tempvars0 |
| TempVariables | tempvars1 |
| jafar::rtslam::RobotConstantMotionModel< LIN_ORDER, ANG_ORDER >::RobotConstantMotionModel | ( | const map_ptr_t & | _mapPtr | ) |
Remote constructor from remote map.
| _map | the remote map |
| void jafar::rtslam::RobotConstantMotionModel< LIN_ORDER, ANG_ORDER >::move_func | ( | const vec & | _x, |
| const vec & | _u, | ||
| const vec & | _n, | ||
| const double | _dt, | ||
| vec & | _xnew, | ||
| mat & | _XNEW_x, | ||
| mat & | _XNEW_pert, | ||
| unsigned | tempSet = 0 |
||
| ) | const [virtual] |
Move one step ahead.
This function predicts the robot state one step of length dt ahead in time, according to the control input control.x and the time interval control.dt.
| _x | the current state vecto |
| _p | the perturbation vector |
| _dt | the sampling time |
| _xnew | the new state vector |
| _XNEW_x | the Jacobian of xnew wrt x |
| _XNEW_pert | the Jacobian of xnew wrt p |
Implements jafar::rtslam::RobotAbstract.
| void jafar::rtslam::RobotConstantMotionModel< LIN_ORDER, ANG_ORDER >::splitControl | ( | const Vu & | u, |
| V & | vi, | ||
| V & | wi | ||
| ) | const [inline, protected] |
Split control vector.
Extracts impulses vi and wi from the control vector.
| vi | the linear impulse. |
| wi | the angular impulse. |
Definition at line 207 of file robotConstantMotionModel.hpp.
| void jafar::rtslam::RobotConstantMotionModel< LIN_ORDER, ANG_ORDER >::splitState | ( | const Vx | x, |
| Vp & | p, | ||
| Vq & | q, | ||
| Vv & | v, | ||
| Vw & | w, | ||
| Vva & | va, | ||
| Vwa & | wa, | ||
| Vvj & | vj, | ||
| Vwj & | wj | ||
| ) | const [inline, protected] |
Split state vector.
Extracts p, q, v and w from the state vector, x = [p, q, v, w].
| x | the state vector |
| p | the position |
| q | the quaternion |
| v | the linear velocity |
| w | the angular velocity |
Definition at line 148 of file robotConstantMotionModel.hpp.
| void jafar::rtslam::RobotConstantMotionModel< LIN_ORDER, ANG_ORDER >::unsplitState | ( | const Vp & | p, |
| const Vq & | q, | ||
| const Vv & | v, | ||
| const Vw & | w, | ||
| const Vva & | va, | ||
| const Vwa & | wa, | ||
| const Vvj & | vj, | ||
| const Vwj & | wj, | ||
| Vx & | x | ||
| ) | const [inline, protected] |
Compose state vector.
Composes the state vector with p, q, v and w, x = [p, q, v, w].
| p | the position |
| q | the quaternion |
| v | the linear velocity |
| w | the angular velocity |
| x | the state vector |
Definition at line 179 of file robotConstantMotionModel.hpp.
| virtual void jafar::rtslam::RobotConstantMotionModel< LIN_ORDER, ANG_ORDER >::writeLogData | ( | kernel::DataLogger & | log | ) | const [virtual] |
Implements this method calling repeatidly log methods.
You should use writeData() or writeDataVector().
Reimplemented from jafar::rtslam::RobotAbstract.
| virtual void jafar::rtslam::RobotConstantMotionModel< LIN_ORDER, ANG_ORDER >::writeLogHeader | ( | kernel::DataLogger & | log | ) | const [virtual] |
Implements this method calling repeatidly log methods.
You should use writeComment(), writeLegend() or writeLegendTokens().
Reimplemented from jafar::rtslam::RobotAbstract.
| Generated on Wed Oct 15 2014 00:37:46 for Jafar by doxygen 1.7.6.1 |

|

