|
Jafar
|
|
Jafar
|
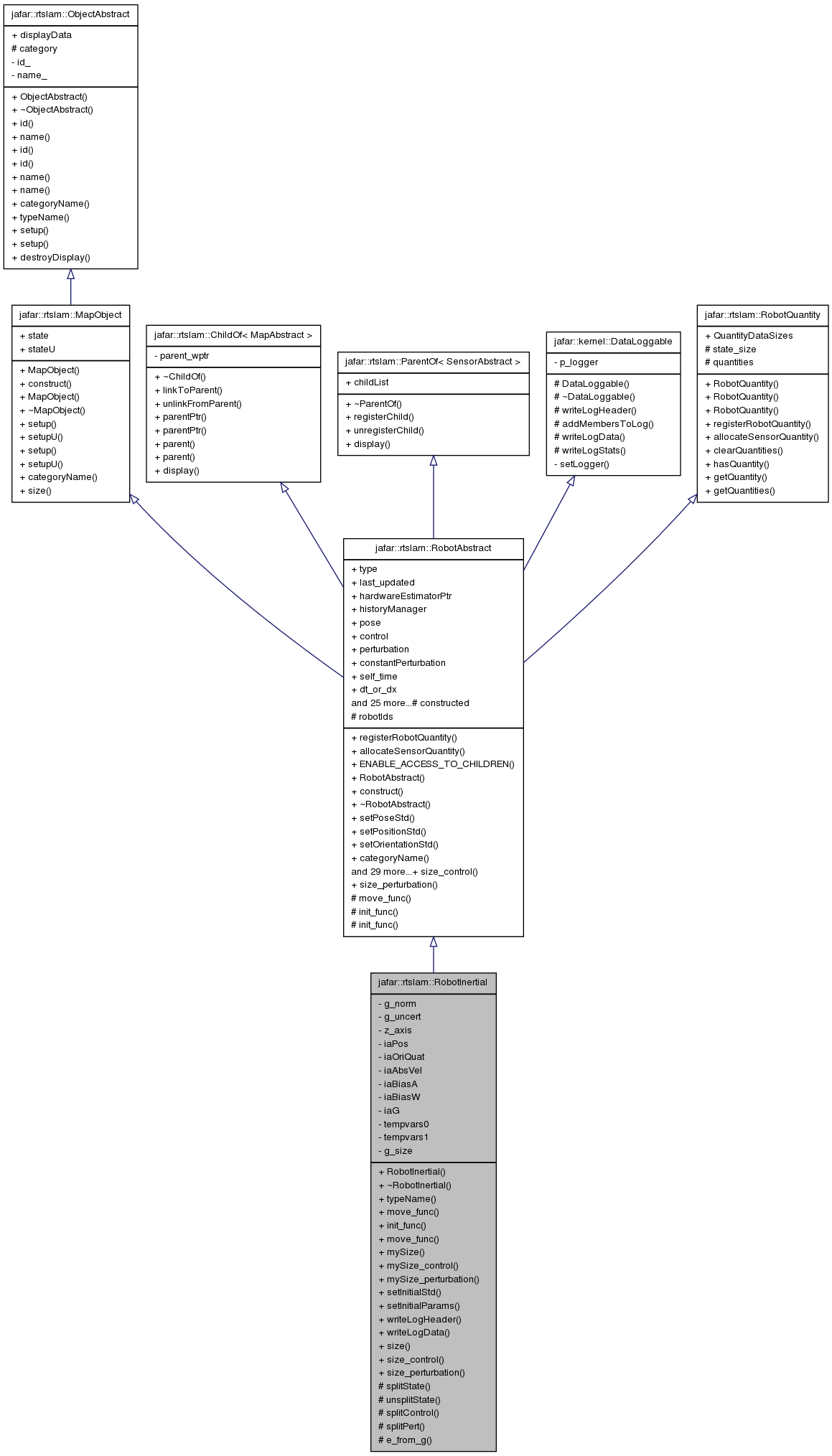
Inertial measurements unit - robot motion model. More...
Inertial measurements unit - robot motion model.
The SLAM origin is the IMU origin.
This motion model is driven by IMU measurements and random perturbations, and defined by:
with u=control.x() the control vector
stacking:
The motion model equation x+ = f(x,u) is decomposed as: #if AVGSPEED
Definition at line 105 of file robotInertial.hpp.
#include <robotInertial.hpp>
Classes | |
| struct | TempVariables |
Public Member Functions | |
| RobotInertial (const map_ptr_t &_mapPtr) | |
| virtual std::string | typeName () const |
| void | move_func (const vec &_x, const vec &_u, const vec &_n, double _dt, vec &_xnew, mat &_XNEW_x, mat &_XNEW_pert, unsigned tempSet=0) const |
| Move one step ahead. | |
| void | init_func (const vec &_x, const vec &_u, const vec &_U, vec &_xnew) |
| Initialize the value of g with the average value of acceleration in the past. | |
| virtual void | move_func () |
| virtual size_t | mySize () |
| virtual size_t | mySize_control () |
| virtual size_t | mySize_perturbation () |
| void | setInitialStd (double velLinStd, double aBiasStd, double wBiasStd, double gravStd) |
| void | setInitialParams (double gNorm) |
| virtual void | writeLogHeader (kernel::DataLogger &log) const |
| Implements this method calling repeatidly log methods. | |
| virtual void | writeLogData (kernel::DataLogger &log) const |
| Implements this method calling repeatidly log methods. | |
Static Public Member Functions | |
| static size_t | size () |
| static size_t | size_control () |
| static size_t | size_perturbation () |
Protected Member Functions | |
| template<class Vx , class Vp , class Vq , class Vv , class Vab , class Vwb , class Vg > | |
| void | splitState (const Vx &x, Vp &p, Vq &q, Vv &v, Vab &ab, Vwb &wb, Vg &g) const |
| Split state vector. | |
| template<class Vp , class Vq , class Vv , class Vab , class Vwb , class Vg , class Vx > | |
| void | unsplitState (const Vp &p, const Vq &q, const Vv &v, const Vab &ab, const Vwb &wb, const Vg &g, Vx &x) const |
| Compose state vector. | |
| template<class Vu , class V > | |
| void | splitControl (const Vu &u, V &am, V &wm) const |
| Split control vector. | |
| template<class Vn , class V > | |
| void | splitPert (const Vn &n, V &an, V &wn, V &ar, V &wr) const |
| Split perturbation vector. | |
| vec | e_from_g (const vec3 &_g) |
Private Attributes | |
| double | g_norm |
| double | g_uncert |
| jblas::vec3 | z_axis |
| ublas::range | iaPos |
| ublas::range | iaOriQuat |
| ublas::range | iaAbsVel |
| ublas::range | iaBiasA |
| ublas::range | iaBiasW |
| ublas::range | iaG |
| TempVariables | tempvars0 |
| TempVariables | tempvars1 |
Static Private Attributes | |
| static int | g_size |
| void jafar::rtslam::RobotInertial::move_func | ( | const vec & | _x, |
| const vec & | _u, | ||
| const vec & | _n, | ||
| double | _dt, | ||
| vec & | _xnew, | ||
| mat & | _XNEW_x, | ||
| mat & | _XNEW_pert, | ||
| unsigned | tempSet = 0 |
||
| ) | const [virtual] |
Move one step ahead.
This function predicts the robot state one step of length dt ahead in time, according to the control input control.x and the time interval control.dt. It updates the state and computes the convenient Jacobian matrices.
This motion model is driven by IMU measurements and random perturbations, and defined by:
Implements jafar::rtslam::RobotAbstract.
| void jafar::rtslam::RobotInertial::splitControl | ( | const Vu & | u, |
| V & | am, | ||
| V & | wm | ||
| ) | const [inline, protected] |
Split control vector.
Extracts noisy measurements am and wm, and perturbationa ar and wr, from the control vector.
| am | the acceleration measurements, with noise |
| wm | the gyrometer measurements, with noise |
| ar | the accelerometer bias random walk noise |
| wr | the gyrometer bias random walk noise |
Definition at line 297 of file robotInertial.hpp.
| void jafar::rtslam::RobotInertial::splitPert | ( | const Vn & | n, |
| V & | an, | ||
| V & | wn, | ||
| V & | ar, | ||
| V & | wr | ||
| ) | const [inline, protected] |
Split perturbation vector.
Extracts noisy measurements am and wm, and perturbationa ar and wr, from the control vector.
| am | the acceleration measurements, with noise |
| wm | the gyrometer measurements, with noise |
| ar | the accelerometer bias random walk noise |
| wr | the gyrometer bias random walk noise |
Definition at line 312 of file robotInertial.hpp.
| void jafar::rtslam::RobotInertial::splitState | ( | const Vx & | x, |
| Vp & | p, | ||
| Vq & | q, | ||
| Vv & | v, | ||
| Vab & | ab, | ||
| Vwb & | wb, | ||
| Vg & | g | ||
| ) | const [inline, protected] |
Split state vector.
Extracts p, q, v, ab, wb and g from the state vector, x = [p, q, v, ab, wb, g].
| p | the position |
| q | the quaternion |
| v | the linear velocity |
| ab | the accelerometer bias |
| wb | the gyrometer bias |
| g | the gravity vector |
Definition at line 239 of file robotInertial.hpp.
| void jafar::rtslam::RobotInertial::unsplitState | ( | const Vp & | p, |
| const Vq & | q, | ||
| const Vv & | v, | ||
| const Vab & | ab, | ||
| const Vwb & | wb, | ||
| const Vg & | g, | ||
| Vx & | x | ||
| ) | const [inline, protected] |
Compose state vector.
Composes the state vector with p, q, v, ab, wb and g, x = [p, q, v, ab, wb, g].
| p | the position |
| q | the quaternion |
| v | the linear velocity |
| ab | the accelerometer bias |
| wb | the gyrometer bias |
| g | the gravity vector |
Definition at line 272 of file robotInertial.hpp.
| virtual void jafar::rtslam::RobotInertial::writeLogData | ( | kernel::DataLogger & | log | ) | const [virtual] |
Implements this method calling repeatidly log methods.
You should use writeData() or writeDataVector().
Reimplemented from jafar::rtslam::RobotAbstract.
| virtual void jafar::rtslam::RobotInertial::writeLogHeader | ( | kernel::DataLogger & | log | ) | const [virtual] |
Implements this method calling repeatidly log methods.
You should use writeComment(), writeLegend() or writeLegendTokens().
Reimplemented from jafar::rtslam::RobotAbstract.
| Generated on Wed Oct 15 2014 00:37:46 for Jafar by doxygen 1.7.6.1 |

|

