|
Jafar
|
|
Jafar
|
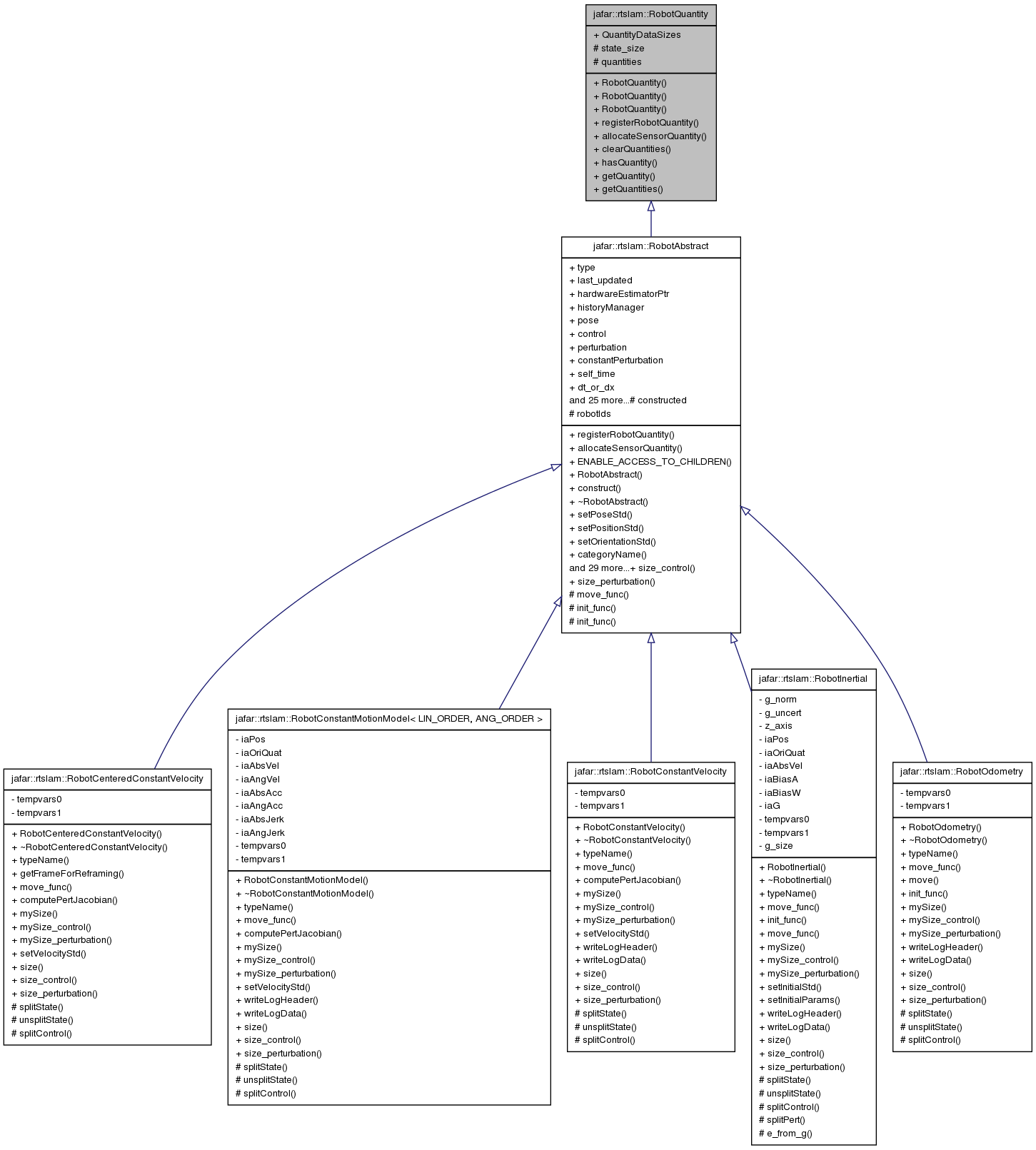
Definition at line 43 of file robotAbstract.hpp.
Public Types | |
| enum | Quantity { qPos, qOriQuat, qAbsVel, qAngVel, qAbsAcc, qAngAcc, qAbsJerk, qAngJerk, qG, qNormG, qNQuantity } |
| enumerates the different quantities that a proprioceptive sensor can provide More... | |
| typedef std::vector< Quantity > | QuantityList |
Public Member Functions | |
| RobotQuantity (QuantityList quants) | |
| RobotQuantity (RobotQuantity const &robQuant, QuantityList quants) | |
| virtual bool | registerRobotQuantity (Quantity quantity) |
| robot or environment quantities to be estimated, that are shared by sensors and predefined | |
| virtual ublas::range | allocateSensorQuantity (size_t size) |
| sensor quantities to be estimated (biases, ...) that are defined by the sensor | |
| virtual void | clearQuantities () |
| clear all allocated quantities | |
| bool | hasQuantity (Quantity quantity) |
| ublas::range | getQuantity (Quantity quantity) |
| jblas::ind_array | getQuantities () |
Static Public Attributes | |
| static const int | QuantityDataSizes [qNQuantity] |
Protected Attributes | |
| size_t | state_size |
| int | quantities [qNQuantity] |
enumerates the different quantities that a proprioceptive sensor can provide
| qPos | position (x y z) |
| qOriQuat | orientation as a quaternion (qx qy qz qw) |
| qAbsVel | linear velocity in the world's frame (vx vy vz) |
| qAngVel | angular velocity in the robot's frame (wx wy wz) |
| qG | earth gravitation (gx gy gz) |
| qNormG | earth gravitation (gx gy gz) |
Definition at line 55 of file robotAbstract.hpp.
| Generated on Wed Oct 15 2014 00:37:46 for Jafar by doxygen 1.7.6.1 |

|

