|
Jafar
|
|
Jafar
|
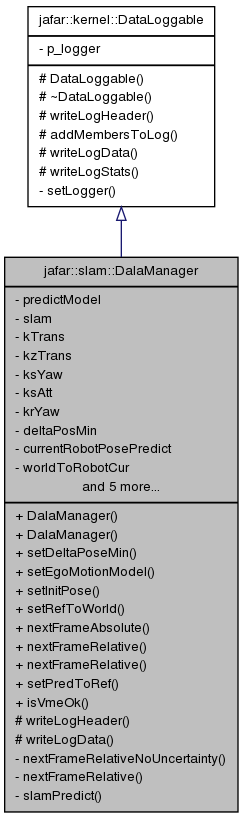
Class for managing Dala. More...
#include <dala.hpp>
Public Member Functions | |
| DalaManager (BaseSlam &slam_, unsigned int robotId_=0) | |
| DalaManager (BaseSlam &slam_, unsigned int robotId_, const jblas::vec &_robotState, const jblas::sym_mat &_robotStateCov) | |
| void | setDeltaPoseMin (double deltaPosMin_) |
| void | setEgoMotionModel (double kTrans_, double kzTrans_, double ksYaw_, double ksAtt_, double krYaw_) |
| void | setInitPose (jblas::vec const &worldToRobotCur_) |
| void | setRefToWorld (jblas::vec const &refToWorld_) |
| bool | nextFrameAbsolute (jblas::vec const &worldToRobotCur_) |
| bool | nextFrameRelative (jblas::vec const &robotPrevToRobotCur_) |
| bool | nextFrameRelative (jblas::vec const &robotPrevToRobotCur_, jblas::sym_mat const &robotPrevToRobotCurCov_, double noiseFactor=1.0) |
| void | setPredToRef (geom::T3DEuler const &predToRef) |
Static Public Member Functions | |
| static bool | isVmeOk (jblas::vec const &me, jblas::sym_mat const &meCov, double thTrans, double thRot) |
Protected Member Functions | |
| void | writeLogHeader (jafar::kernel::DataLogger &dataLogger) const |
| Implements this method calling repeatidly log methods. | |
| void | writeLogData (jafar::kernel::DataLogger &dataLogger) const |
| Implements this method calling repeatidly log methods. | |
Private Member Functions | |
| bool | nextFrameRelativeNoUncertainty () |
| bool | nextFrameRelative () |
| void | slamPredict () |
Private Attributes | |
| Full3dPredictModel | predictModel |
| BaseSlam & | slam |
| double | kTrans |
| double | kzTrans |
| double | ksYaw |
| double | ksAtt |
| double | krYaw |
| double | deltaPosMin |
| geom::T3DEuler | currentRobotPosePredict |
| geom::T3DEuler | worldToRobotCur |
| geom::T3DEuler | worldToRobotPrev |
| geom::T3DEuler | robotPrevToRobotCur |
| geom::T3DEuler | worldToRobot |
| geom::T3DEuler | refToWorld |
| geom::T3DEuler | worldToRef |
| int | robotId |
| void jafar::slam::DalaManager::setEgoMotionModel | ( | double | kTrans_, |
| double | kzTrans_, | ||
| double | ksYaw_, | ||
| double | ksAtt_, | ||
| double | krYaw_ | ||
| ) | [inline] |
| kTrans_ | uncertainty on forward translation when moving forward (m/sqrt(m)) |
| kzTrans_ | uncertainty on vertical translation when moving forward (m/sqrt(m)) |
| ksYaw_ | uncertainty on Yaw-rotation when moving forward (rad/sqrt(m)) |
| ksAtt_ | uncertainty on Pitch-rotation and Roll-rotation when moving forward (rad/sqrt(m)) |
| krYaw_ | uncertainty on Yaw-rotation when Yaw-rotating (rad/sqrt(rad)) |
| void jafar::slam::DalaManager::writeLogData | ( | jafar::kernel::DataLogger & | log | ) | const [protected, virtual] |
Implements this method calling repeatidly log methods.
You should use writeData() or writeDataVector().
Implements jafar::kernel::DataLoggable.
| void jafar::slam::DalaManager::writeLogHeader | ( | jafar::kernel::DataLogger & | log | ) | const [protected, virtual] |
Implements this method calling repeatidly log methods.
You should use writeComment(), writeLegend() or writeLegendTokens().
Implements jafar::kernel::DataLoggable.
| Generated on Wed Oct 15 2014 00:37:48 for Jafar by doxygen 1.7.6.1 |

|

