|
Jafar
|
|
Jafar
|
Store the pose of each maps in a list. More...
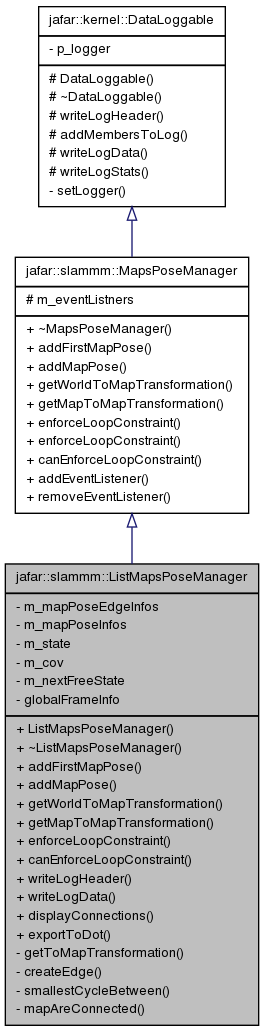
Store the pose of each maps in a list.
Definition at line 13 of file ListMapsPoseManager.hpp.
#include <ListMapsPoseManager.hpp>
Classes | |
| struct | MapPoseInfo |
| struct | MapPoseInfoEdge |
Public Member Functions | |
| ListMapsPoseManager (std::size_t maxStateSize) | |
| virtual void | addFirstMapPose (unsigned int _mapId, unsigned int _robotId, const jblas::vec &_robotState, const jblas::mat &_robotStateCov) |
| Add the pose of the first map in the world. | |
| virtual void | addMapPose (unsigned int _mapId, unsigned int _robotId, unsigned int _previousMapId, const jblas::vec &_robotState, const jblas::mat &_robotStateCov) |
| Add the pose of a map in reference to an other map. | |
| virtual jafar::geom::T3DEuler | getWorldToMapTransformation (unsigned int _mapId) const |
| virtual jafar::geom::T3DEuler | getMapToMapTransformation (unsigned int _firstMapId, unsigned int _secondMapId) const |
| virtual void | enforceLoopConstraint (unsigned int _firstMapId, unsigned int _secondMapId, const jblas::vec &_transformation, const jblas::sym_mat &_transformationCov) |
| Enforce loop constraints when a transformation between two maps is known. | |
| virtual bool | canEnforceLoopConstraint (unsigned int _firstMapId, unsigned int _secondMapId) const |
| virtual void | writeLogHeader (kernel::DataLogger &log) const |
| Implements this method calling repeatidly log methods. | |
| virtual void | writeLogData (kernel::DataLogger &log) const |
| Implements this method calling repeatidly log methods. | |
| void | displayConnections () const |
| void | exportToDot (char *_filename) |
| Export the graph structure to dot. | |
Private Types | |
|
typedef std::list< std::pair < MapPoseInfo *, MapPoseInfoEdge * > > | CycleType |
Private Member Functions | |
| void | getToMapTransformation (jafar::geom::T3DEuler &transfo, unsigned int _mapId, unsigned int _secondMapId) const |
| Get the transformation to a map. | |
| MapPoseInfoEdge * | createEdge (int robotStateSize) |
| CycleType | smallestCycleBetween (MapPoseInfo *_firstMap, MapPoseInfo *_secondMap) const |
| bool | mapAreConnected (MapPoseInfo *_map1, MapPoseInfo *_map2) const |
Private Attributes | |
| std::list< MapPoseInfoEdge * > | m_mapPoseEdgeInfos |
| list of edges for memory management purposes | |
|
std::map< unsigned int, MapPoseInfo * > | m_mapPoseInfos |
| jblas::vec | m_state |
| jblas::sym_mat | m_cov |
| int | m_nextFreeState |
| MapPoseInfo * | globalFrameInfo |
| virtual void jafar::slammm::ListMapsPoseManager::enforceLoopConstraint | ( | unsigned int | _firstMapId, |
| unsigned int | _secondMapId, | ||
| const jblas::vec & | _transformation, | ||
| const jblas::sym_mat & | _transformationCov | ||
| ) | [virtual] |
Enforce loop constraints when a transformation between two maps is known.
| _transformation | the transformation from the first map to the second map |
| _transformationCov |
Implements jafar::slammm::MapsPoseManager.
| virtual jafar::geom::T3DEuler jafar::slammm::ListMapsPoseManager::getMapToMapTransformation | ( | unsigned int | _firstMapId, |
| unsigned int | _secondMapId | ||
| ) | const [virtual] |
Implements jafar::slammm::MapsPoseManager.
| void jafar::slammm::ListMapsPoseManager::getToMapTransformation | ( | jafar::geom::T3DEuler & | transfo, |
| unsigned int | _mapId, | ||
| unsigned int | _secondMapId | ||
| ) | const [private] |
Get the transformation to a map.
| _secondMapId | id of the second map (if possible) |
| virtual jafar::geom::T3DEuler jafar::slammm::ListMapsPoseManager::getWorldToMapTransformation | ( | unsigned int | _mapId | ) | const [virtual] |
Implements jafar::slammm::MapsPoseManager.
| bool jafar::slammm::ListMapsPoseManager::mapAreConnected | ( | MapPoseInfo * | _map1, |
| MapPoseInfo * | _map2 | ||
| ) | const [private] |
| CycleType jafar::slammm::ListMapsPoseManager::smallestCycleBetween | ( | MapPoseInfo * | _firstMap, |
| MapPoseInfo * | _secondMap | ||
| ) | const [private] |
| virtual void jafar::slammm::ListMapsPoseManager::writeLogData | ( | kernel::DataLogger & | log | ) | const [virtual] |
Implements this method calling repeatidly log methods.
You should use writeData() or writeDataVector().
Implements jafar::kernel::DataLoggable.
| virtual void jafar::slammm::ListMapsPoseManager::writeLogHeader | ( | kernel::DataLogger & | log | ) | const [virtual] |
Implements this method calling repeatidly log methods.
You should use writeComment(), writeLegend() or writeLegendTokens().
Implements jafar::kernel::DataLoggable.
| Generated on Wed Oct 15 2014 00:37:50 for Jafar by doxygen 1.7.6.1 |

|

