|
Jafar
|
|
Jafar
|
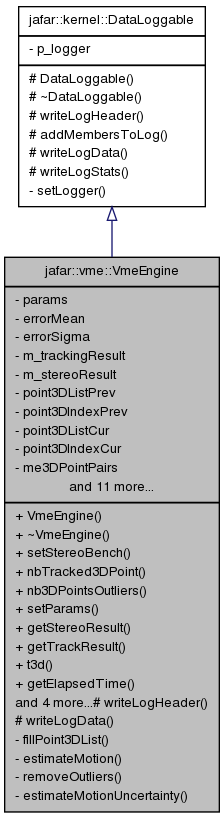
Visual Motion Estimator (VME). More...
Visual Motion Estimator (VME).
Definition at line 165 of file engine.hpp.
#include <engine.hpp>
Public Member Functions | |
| VmeEngine (jafar::geom::T3D::Type t3dType, jafar::camera::StereoBench const &stereoBench) | |
| void | setStereoBench (jafar::camera::StereoBench const &stereoBench) |
| std::size_t | nbTracked3DPoint () |
| int | nb3DPointsOutliers () |
| void | setParams (VmeEngineParams const ¶ms_) |
| Set parameters. | |
| const jafar::gfm::MatchingResult & | getStereoResult () const |
| const jafar::gfm::MatchingResult & | getTrackResult () const |
| jafar::geom::T3D & | t3d () |
| long | getElapsedTime () const |
| void | init (const jafar::image::Image &imageLeft, const jafar::image::Image &imageRight, unsigned int frameIndex_=0) |
| void | init (const jafar::gfm::MatchingResult &stereoResult, unsigned int frameIndex_=0) |
| void | estimateMotion (const jafar::image::Image &imageLeft, const jafar::image::Image &imageRight, unsigned int frameIndex_=0) |
| void | estimateMotion (const jafar::gfm::MatchingResult &trackingResult, const jafar::gfm::MatchingResult &stereoResult, unsigned int frameIndex_=0) |
| int | count3DPointPairs () const |
Protected Member Functions | |
| virtual void | writeLogHeader (jafar::kernel::DataLogger &log) const |
| Implements this method calling repeatidly log methods. | |
| virtual void | writeLogData (jafar::kernel::DataLogger &log) const |
| Implements this method calling repeatidly log methods. | |
Private Types | |
| typedef std::list< Point3DPair > | Point3DPairList |
Private Member Functions | |
| void | fillPoint3DList (const jafar::gfm::MatchingResult &stereoResult, std::list< Point3D > &point3DList, std::vector< Point3D * > &point3DIndex) |
| This method compute the 3D points using the stereo model. | |
| void | estimateMotion (bool doComputeErrors) |
| bool | removeOutliers (int k) |
| void | estimateMotionUncertainty () |
Private Attributes | |
| VmeEngineParams | params |
| vme parameters | |
| double | errorMean |
| mean of error | |
| double | errorSigma |
| standard deviation of error | |
| gfm::MatchingResult | m_trackingResult |
| gfm::MatchingResult | m_stereoResult |
| std::list< Point3D > | point3DListPrev |
| 3D points from previous frame | |
| std::vector< Point3D * > | point3DIndexPrev |
| 3D points from previous frame by their index in left image | |
| std::list< Point3D > | point3DListCur |
| 3D points from current frame | |
| std::vector< Point3D * > | point3DIndexCur |
| 3D points from current frame by their index in left image | |
| Point3DPairList | me3DPointPairs |
| 3D points pairs which are used for the optimisation | |
| std::size_t | sizeMe3DPointPairs |
| size of the list me3DPointPairs (optimization: std::list size() method is not constant time) | |
| double | sumMe3DPointPairsWeights |
| jblas::mat33 | R |
| rotation matrix | |
| jblas::vec3 | t |
| translation vector | |
| jblas::diag_mat | uvdCov |
| [u,v,disp] covariance matrix (no cross correlation) | |
| geom::T3D * | m_t3d |
| the estimated t3d | |
| camera::StereoBench | m_stereoBench |
| gfm::EngineStereoTracking | m_engineStereoTracking |
| unsigned int | frameIndex |
| int | nbOutliers |
| number of outliers removed | |
| long | elapsedTime |
| bool | success |
| int jafar::vme::VmeEngine::count3DPointPairs | ( | ) | const [inline] |
Definition at line 303 of file engine.hpp.
References sizeMe3DPointPairs.
| void jafar::vme::VmeEngine::fillPoint3DList | ( | const jafar::gfm::MatchingResult & | stereoResult, |
| std::list< Point3D > & | point3DList, | ||
| std::vector< Point3D * > & | point3DIndex | ||
| ) | [private] |
This method compute the 3D points using the stereo model.
If uncertainty is enabled, this method also computes 3D points uncertainties.
| virtual void jafar::vme::VmeEngine::writeLogData | ( | jafar::kernel::DataLogger & | log | ) | const [protected, virtual] |
Implements this method calling repeatidly log methods.
You should use writeData() or writeDataVector().
Implements jafar::kernel::DataLoggable.
| virtual void jafar::vme::VmeEngine::writeLogHeader | ( | jafar::kernel::DataLogger & | log | ) | const [protected, virtual] |
Implements this method calling repeatidly log methods.
You should use writeComment(), writeLegend() or writeLegendTokens().
Implements jafar::kernel::DataLoggable.
| Generated on Wed Oct 15 2014 00:37:52 for Jafar by doxygen 1.7.6.1 |

|

