|
Jafar
|
This Visual Motion Estimator (VME) module implements well-known algorithms (see doc/ for papers). Several highlights of this implementation:
This module has been written from scratch, no code is imported from calife or numerical recipe ;-).
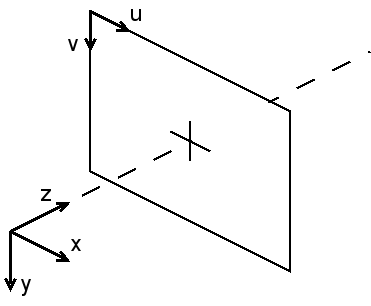
The motion estimate is given in the left camera reference frame, which is defined in the following figure.
estimateMotion : estimate motion between two stereo frames, this macro uses module stereo to correct stereo images pairs.The interface of the module is generated from the following files:
try { } catch block for this module. Classes | |
| class | jafar::vme::Point3D |
| A 3D point with its uncertainty. More... | |
| class | jafar::vme::Point3DPair |
| A Point3DPair links two 3D points which are matched between the two stereo frames. More... | |
| class | jafar::vme::VmeEngineParams |
| This class contains parameters for the vme algorithm. More... | |
| class | jafar::vme::VmeEngine |
| Visual Motion Estimator (VME). More... | |
| class | jafar::vme::VmeException |
| Base class for all exceptions defined in the module vme. More... | |
| void | jafar::vme::gJacTEuler (jblas::vec const &p, jblas::vec const &pp, jblas::vec const &T, jblas::sym_mat &J) |
| void | jafar::vme::gJacpEuler (jblas::vec const &p, jblas::vec const &pp, jblas::vec const &T, jblas::mat &J) |
| Jacobian computation for Euler representation. | |
| void | jafar::vme::gJacppEuler (jblas::vec const &p, jblas::vec const &pp, jblas::vec const &T, jblas::mat &J) |
| Jacobian computation for Euler representation. | |
| void jafar::vme::gJacTEuler | ( | jblas::vec const & | p, |
| jblas::vec const & | pp, | ||
| jblas::vec const & | T, | ||
| jblas::sym_mat & | J | ||
| ) |
Jacobian computation for Euler representation
| Generated on Wed Oct 15 2014 00:37:30 for Jafar by doxygen 1.7.6.1 |

|

