|
Jafar
|
|
Jafar
|
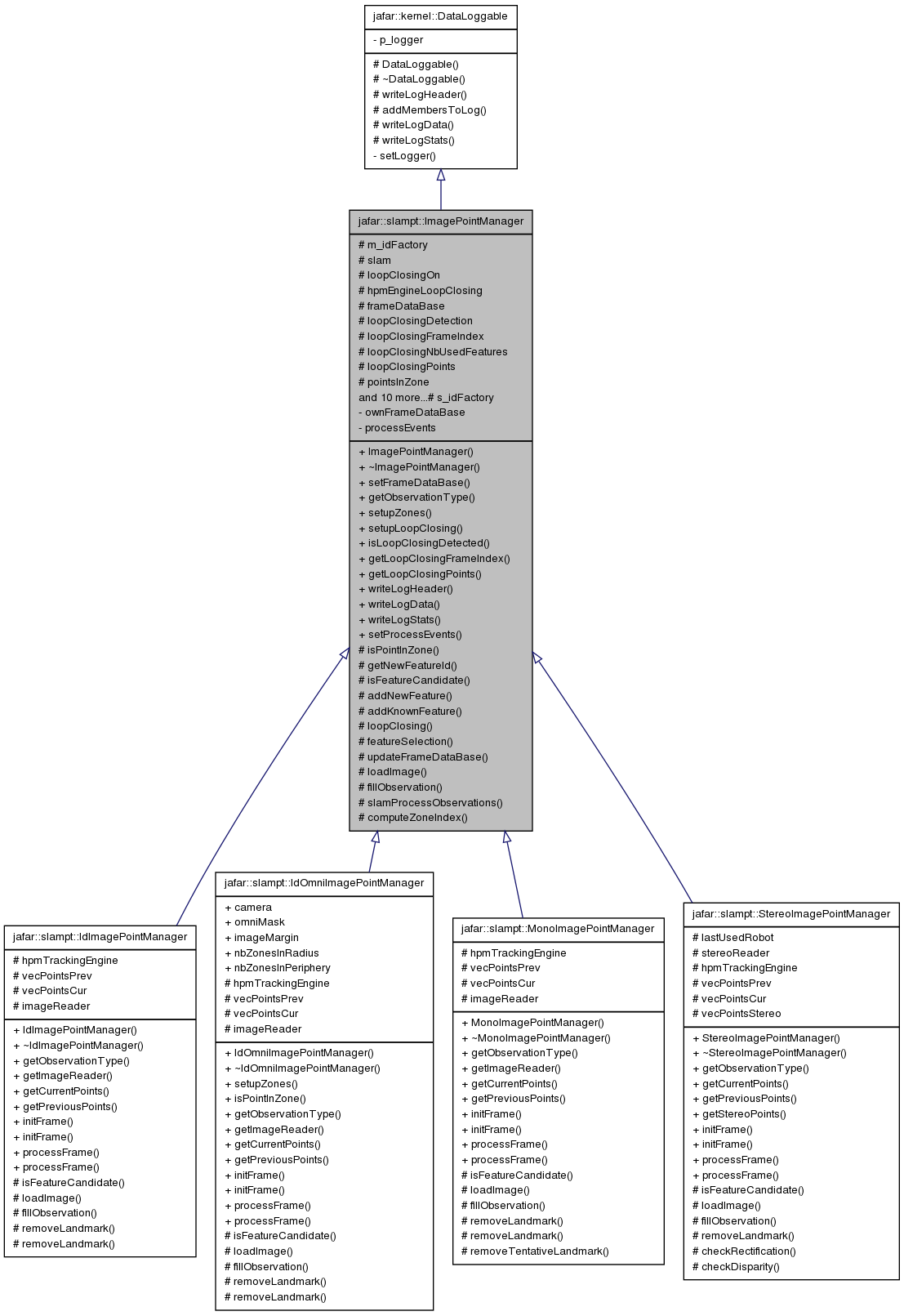
Base class for doing slam using points extracted in an image. More...
Base class for doing slam using points extracted in an image.
Definition at line 67 of file imagePointManager.hpp.
#include <imagePointManager.hpp>
Classes | |
| struct | IdPredicate |
| class | Stats |
Public Member Functions | |
| ImagePointManager (slam::BaseSlam &slam_, jafar::hpm::Engine &hpmEngineLoopClosing_, kernel::IdFactory<> *_idFactory) | |
| void | setFrameDataBase (MonoImageFrameDataBase *_frameDataBase) |
|
virtual slam::Observation::ObservationType | getObservationType () const =0 |
| virtual void | setupZones (unsigned int imageWidth_, unsigned int imageHeight_, double reduction_, std::size_t nbZonesU_, std::size_t nbZonesV_, unsigned int nbDesiredFeaturesPerZone_) |
| void | setupLoopClosing (double loopClosingDistanceMax_, unsigned int loopClosingIndexDistanceMin_, bool enable=true) |
| bool | isLoopClosingDetected () const |
| unsigned int | getLoopClosingFrameIndex () const |
| jafar::hpm::vecHarrisPoints const & | getLoopClosingPoints () const |
| virtual void | writeLogHeader (jafar::kernel::DataLogger &dataLogger) const |
| Implements this method calling repeatidly log methods. | |
| virtual void | writeLogData (jafar::kernel::DataLogger &dataLogger) const |
| Implements this method calling repeatidly log methods. | |
| virtual void | writeLogStats (jafar::kernel::DataLogger &log) const |
| write stats at the end of the log | |
| void | setProcessEvents (int events_) |
Protected Types | |
|
typedef std::vector < QualityIndexPoint > | QualityIndexPoints |
| typedef std::list< std::size_t > | FeaturesList |
| features observed in current frame | |
Protected Member Functions | |
|
virtual boost::tuple< bool, unsigned int > | isPointInZone (double u_, double v_) |
| unsigned int | getNewFeatureId () |
| virtual bool | isFeatureCandidate (std::size_t index_)=0 |
| void | addNewFeature (std::size_t index_, hpm::HarrisPoint &point_) |
| void | addKnownFeature (std::size_t index_, jafar::hpm::HarrisPoint const &point_) |
| template<class VecPoints > | |
| void | loopClosing (VecPoints &framePoints_, unsigned int robotId_) |
| template<class VecPoints > | |
| void | featureSelection (VecPoints &points_) |
| template<class VecPoints > | |
| void | updateFrameDataBase (VecPoints &points_, unsigned int robotId_) |
| virtual jafar::image::Image * | loadImage (unsigned int frameNumber) const =0 |
| virtual bool | fillObservation (std::size_t index_, slam::Observation &obs, unsigned int sensorId_, unsigned int robotId_) const =0 |
| void | slamProcessObservations (unsigned int robotId_, unsigned int sensorId_) const |
| there is only one point manager but the observations corresponds to each robotId | |
Static Protected Member Functions | |
| static unsigned int | computeZoneIndex (double x_, unsigned int nbInt_, double xMax_) |
Protected Attributes | |
| kernel::IdFactory * | m_idFactory |
| slam::BaseSlam & | slam |
| bool | loopClosingOn |
| For loop closing. | |
| jafar::hpm::Engine & | hpmEngineLoopClosing |
| MonoImageFrameDataBase * | frameDataBase |
| bool | loopClosingDetection |
| unsigned int | loopClosingFrameIndex |
| unsigned int | loopClosingNbUsedFeatures |
| jafar::hpm::vecHarrisPoints | loopClosingPoints |
| std::vector< QualityIndexPoints > | pointsInZone |
| points from last frame which are candidate | |
| std::vector< unsigned int > | nbFeaturesInZone |
| FeaturesList | knownFeatures |
| FeaturesList | newFeatures |
| unsigned int | imageWidth |
| cells definition | |
| unsigned int | imageHeight |
| std::size_t | nbZonesU |
| std::size_t | nbZonesV |
| unsigned int | nbDesiredFeaturesPerZone |
| unsigned int | processingTime |
|
class jafar::slampt::ImagePointManager::Stats | stats |
| unsigned int | currentFrameIndex |
| current frame number | |
Static Protected Attributes | |
| static kernel::IdFactory * | s_idFactory |
Private Attributes | |
| bool | ownFrameDataBase |
| int | processEvents |
Friends | |
| std::ostream & | operator<< (std::ostream &s, const ImagePointManager &slam_) |
| std::string | getZones (ImagePointManager const &m) |
| virtual void jafar::slampt::ImagePointManager::writeLogData | ( | jafar::kernel::DataLogger & | log | ) | const [virtual] |
Implements this method calling repeatidly log methods.
You should use writeData() or writeDataVector().
Implements jafar::kernel::DataLoggable.
| virtual void jafar::slampt::ImagePointManager::writeLogHeader | ( | jafar::kernel::DataLogger & | log | ) | const [virtual] |
Implements this method calling repeatidly log methods.
You should use writeComment(), writeLegend() or writeLegendTokens().
Implements jafar::kernel::DataLoggable.
| Generated on Wed Oct 15 2014 00:37:50 for Jafar by doxygen 1.7.6.1 |

|

