|
Jafar
|
|
Jafar
|
Base class for all observations defined in the module rtslam. More...
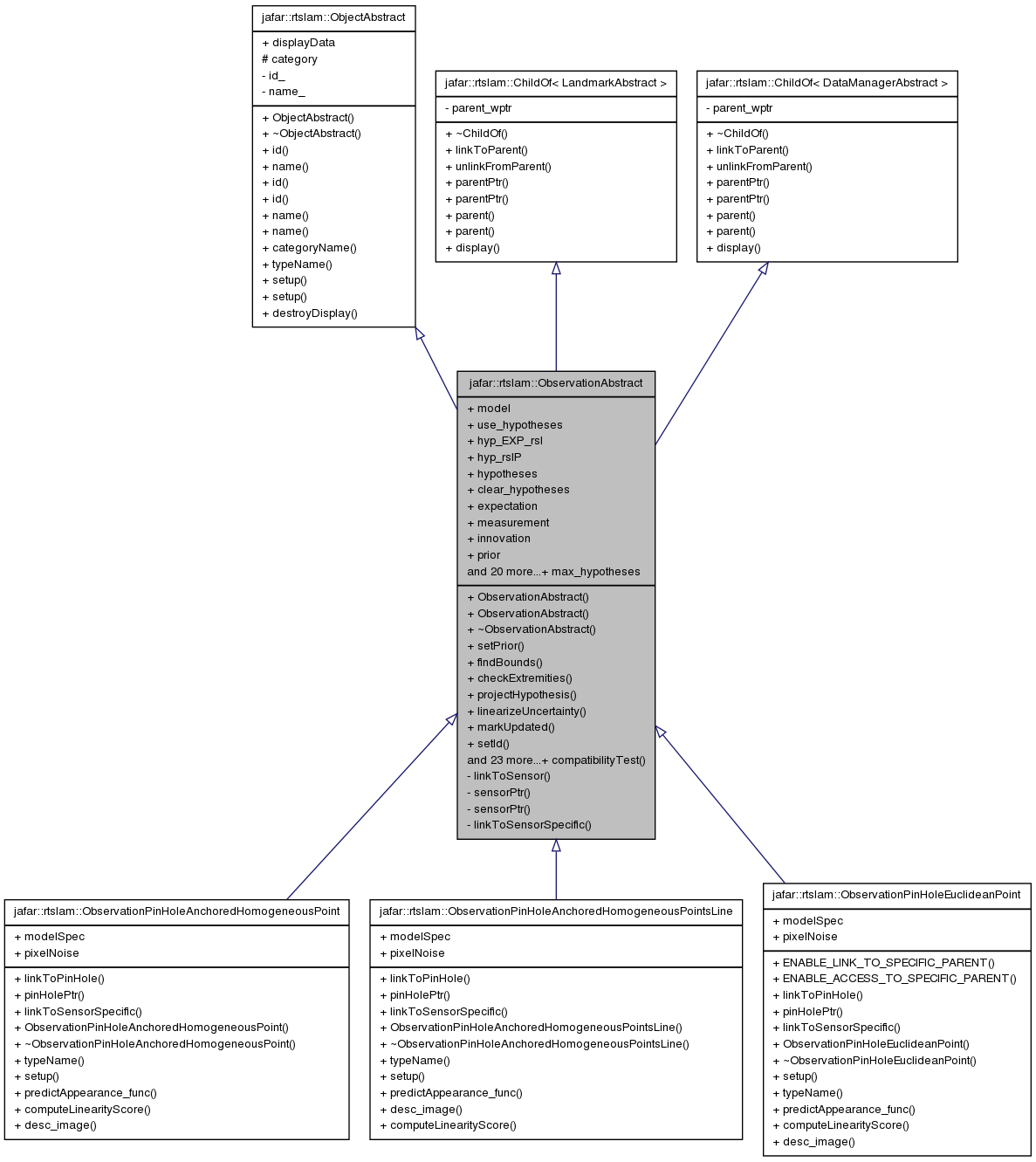
Base class for all observations defined in the module rtslam.
In this class, the Jacobians are sparse. The states that contribute to the observation are available through an indirect array
where we use the subindex *_rsl to mean that it corresponds to robot, sensor and landmark map states.
With this we have, for example:
Definition at line 123 of file observationAbstract.hpp.
#include <observationAbstract.hpp>
Classes | |
| struct | Counters |
| Counters. More... | |
| struct | Events |
| Events. More... | |
| struct | Hypothesis |
| struct | Tasks |
| Tasks. More... | |
Public Types | |
| enum | type_enum { PNT_PH_EUC, PNT_PH_AH, PNT_PH_AHPL } |
Public Member Functions | |
| ObservationAbstract (const sensor_ptr_t &_senPtr, const landmark_ptr_t &_lmkPtr, const size_t _size, const size_t size_nonobs=0) | |
| Size constructor. | |
| ObservationAbstract (const sensor_ptr_t &_senPtr, const landmark_ptr_t &_lmkPtr, const size_t _size_meas, const size_t _size_exp, const size_t _size_inn, const size_t _size_nonobs=0) | |
| Sizes constructor. | |
| void | setPrior (const Gaussian &_prior) |
| bool | findBounds (jblas::vec &lmk, unsigned iid, jblas::vec7 const &sg, jblas::vec &ids) |
| Find the bounds on the non obs variables so that the landmark remains visible. | |
| bool | checkExtremities (jblas::vec &lmk, unsigned iid, double id_sig, Expectation const &hypexp, jblas::vec &id_bounds, jblas::vec &ids, jblas::vec7 const &sg, jblas::vec &exp, jblas::sym_mat &expP, jblas::vec &nobs, double k) |
| Check that the extremities of the non obs uncertainty are compatible with the projection. | |
| void | projectHypothesis (Hypothesis &hyp, jblas::vec &lmk, unsigned iid, jblas::vec7 const &sg, jblas::vec &exp, jblas::vec &nobs) |
| void | linearizeUncertainty () |
| Create multiple hypotheses when the search ellipse covers a non linear area. | |
| void | markUpdated () |
| void | setId () |
| virtual std::string | typeName () const |
| std::string | categoryName () const |
| void | project (bool multi_hyp=true) |
| Project and get expectation covariances. | |
| void | projectMean () |
| Only project (without covariances) | |
| virtual bool | isVisible () |
| Is visible. | |
| void | backProject () |
| Back-project. | |
| virtual void | computeInnovation () |
| Compute innovation from measurement and expectation. | |
| virtual void | computeInnovationMean (vec &inn, const vec &meas, const vec &exp) const |
| virtual double | computeRelevance () |
| virtual void | predictInfoGain () |
| Predict information gain. | |
| virtual bool | compatibilityTest (const double mahaDist) |
| Individual compatibility test. | |
| void | clearFlags () |
| Clear all event flags. | |
| void | clearCounters () |
| virtual bool | predictVisibility () |
| Predict visibility. | |
| virtual bool | predictAppearance (bool force=false) |
| Predict appearance. | |
| virtual bool | updateDescriptor () |
| virtual void | updateVisibilityMap () |
| virtual bool | isDescriptorValid () |
| virtual bool | predictAppearance_func ()=0 |
| double | getMatchScore () |
| void | update (bool correct_P=true) |
| virtual double | computeLinearityScore ()=0 |
| return a linearity score for the associated converged type. 0 means fully linear. <0 means already converged. | |
| virtual void | transferInfoObs (observation_ptr_t &obs) |
| virtual void | desc_image (image::oimstream &os) const |
Static Public Member Functions | |
| static bool | compatibilityTest (Measurement const &meas, Expectation const &exp, double mahaDist) |
Public Attributes | |
|
boost::shared_ptr < ObservationModelAbstract > | model |
| bool | use_hypotheses |
| jblas::mat | hyp_EXP_rsl |
| jblas::sym_mat | hyp_rslP |
| std::vector< Hypothesis > | hypotheses |
| bool | clear_hypotheses |
| Expectation | expectation |
| Measurement | measurement |
| Innovation | innovation |
| Gaussian | prior |
| appearance_ptr_t | predictedAppearance |
| appearance_ptr_t | observedAppearance |
| jblas::sym_mat | noiseCovariance |
| ind_array | ia_rsl |
| Ind. array of mapped indices of robot, sensor and landmark (ie, sensor might or might not be there). | |
| mat | SG_rs |
| Jacobian of global sensor pose wrt. robot and sensor mapped states. | |
| mat | EXP_sg |
| Jacobian of expectation wrt. global sensor pose. | |
| mat | EXP_l |
| Jacobian of expectation wrt. landmark state. | |
| mat | EXP_rsl |
| Jacobian of the expectation wrt. the mapped states of robot, sensor and landmark. | |
| mat | INN_meas |
| Jacobian of the innovation wrt. the measurement. | |
| mat | INN_exp |
| Jacobian of the innovation wrt. the expectation. | |
| mat | INN_rsl |
| Jacobian of the innovation wrt. the mapped states of robot, sensor and landmark. | |
| mat | LMK_sg |
| Jacobian of the landmark wrt. the global sensor pose. | |
| mat | LMK_meas |
| Jacobian of the landmark wrt. the measurement. | |
| mat | LMK_prior |
| Jacobian of the landmark wrt. the prior. | |
| mat | LMK_rs |
| Jacobian of the landmark wrt. the robot and sensor mapped states. | |
|
struct jafar::rtslam::ObservationAbstract::Counters | counters |
|
struct jafar::rtslam::ObservationAbstract::Events | events |
| bool | updatable |
| last time it was measured, was it updated | |
|
struct jafar::rtslam::ObservationAbstract::Tasks | tasks |
| int | searchSize |
| type_enum | type |
Static Public Attributes | |
| static const unsigned | max_hypotheses |
Private Member Functions | |
| void | linkToSensor (sensor_ptr_t ptr) |
| sensor_ptr_t | sensorPtr (void) |
| const sensor_ptr_t | sensorPtr (void) const |
| void | linkToSensorSpecific (sensor_ptr_t ptr) |
Friends | |
| std::ostream & | operator<< (std::ostream &s, ObservationAbstract const &obs) |
| image::oimstream & | operator<< (image::oimstream &s, ObservationAbstract const &obs) |
| PNT_PH_EUC |
Pin hole Euclidean point. |
| PNT_PH_AH |
Pin hole Anchored homogeneous point. |
| PNT_PH_AHPL |
Pin hole Anchored homogeneous points line. |
Definition at line 153 of file observationAbstract.hpp.
| jafar::rtslam::ObservationAbstract::ObservationAbstract | ( | const sensor_ptr_t & | _senPtr, |
| const landmark_ptr_t & | _lmkPtr, | ||
| const size_t | _size, | ||
| const size_t | size_nonobs = 0 |
||
| ) |
Size constructor.
| _size | size of measurement space (used for measurement, expectation and innovation). |
| virtual bool jafar::rtslam::ObservationAbstract::compatibilityTest | ( | const double | mahaDist | ) | [virtual] |
Individual compatibility test.
This is the trivial individual compatibility test based on the Mahalanobis distance.
| MahaDistSquare | the Mahalanobis distance square to test against. |
Use the chi-square table below to choose a value of MahaDistSquare:
PROB: 0.995 0.975 0.20 0.10 0.05 0.025 0.02 0.01 0.005 0.002 0.001 DOF: +--------------------- CHI SQUARE VALUES -- OR -- MAHADISTSQUARE VALUES --------------------- 1 | 0.0000393 0.000982 1.642 2.706 3.841 5.024 5.412 6.635 7.879 9.550 10.828 2 | 0.0100 0.0506 3.219 4.605 5.991 7.378 7.824 9.210 10.597 12.429 13.816 3 | 0.0717 0.216 4.642 6.251 7.815 9.348 9.837 11.345 12.838 14.796 16.266 4 | 0.207 0.484 5.989 7.779 9.488 11.143 11.668 13.277 14.860 16.924 18.467 5 | 0.412 0.831 7.289 9.236 11.070 12.833 13.388 15.086 16.750 18.907 20.515 6 | 0.676 1.237 8.558 10.645 12.592 14.449 15.033 16.812 18.548 20.791 22.458 7 | 0.989 1.690 9.803 12.017 14.067 16.013 16.622 18.475 20.278 22.601 24.322 8 | 1.344 2.180 11.030 13.362 15.507 17.535 18.168 20.090 21.955 24.352 26.124 9 | 1.735 2.700 12.242 14.684 16.919 19.023 19.679 21.666 23.589 26.056 27.877 10 | 2.156 3.247 13.442 15.987 18.307 20.483 21.161 23.209 25.188 27.722 29.588 11 | 2.603 3.816 14.631 17.275 19.675 21.920 22.618 24.725 26.757 29.354 31.264 12 | 3.074 4.404 15.812 18.549 21.026 23.337 24.054 26.217 28.300 30.957 32.909 13 | 3.565 5.009 16.985 19.812 22.362 24.736 25.472 27.688 29.819 32.535 34.528 14 | 4.075 5.629 18.151 21.064 23.685 26.119 26.873 29.141 31.319 34.091 36.123 15 | 4.601 6.262 19.311 22.307 24.996 27.488 28.259 30.578 32.801 35.628 37.697 16 | 5.142 6.908 20.465 23.542 26.296 28.845 29.633 32.000 34.267 37.146 39.252 17 | 5.697 7.564 21.615 24.769 27.587 30.191 30.995 33.409 35.718 38.648 40.790 18 | 6.265 8.231 22.760 25.989 28.869 31.526 32.346 34.805 37.156 40.136 42.312 19 | 6.844 8.907 23.900 27.204 30.144 32.852 33.687 36.191 38.582 41.610 43.820 20 | 7.434 9.591 25.038 28.412 31.410 34.170 35.020 37.566 39.997 43.072 45.315
| virtual void jafar::rtslam::ObservationAbstract::computeInnovation | ( | ) | [virtual] |
Compute innovation from measurement and expectation.
This is the trivial innovation function inn = meas - exp. Derive the class and overload this method to use other, non-trivial innovation functions.
| virtual bool jafar::rtslam::ObservationAbstract::isVisible | ( | ) | [inline, virtual] |
| virtual void jafar::rtslam::ObservationAbstract::predictInfoGain | ( | ) | [virtual] |
Predict information gain.
This is the trivial information gain computed with det(expectation.P()). Derive this class and overload this method to implement other formulas.
| virtual bool jafar::rtslam::ObservationAbstract::predictVisibility | ( | ) | [inline, virtual] |
Predict visibility.
Implement this in the derived class.
Visibility can only be established after project_func() has been called.
Definition at line 374 of file observationAbstract.hpp.
| Generated on Wed Oct 15 2014 00:37:45 for Jafar by doxygen 1.7.6.1 |

|

