|
Jafar
|
|
Jafar
|
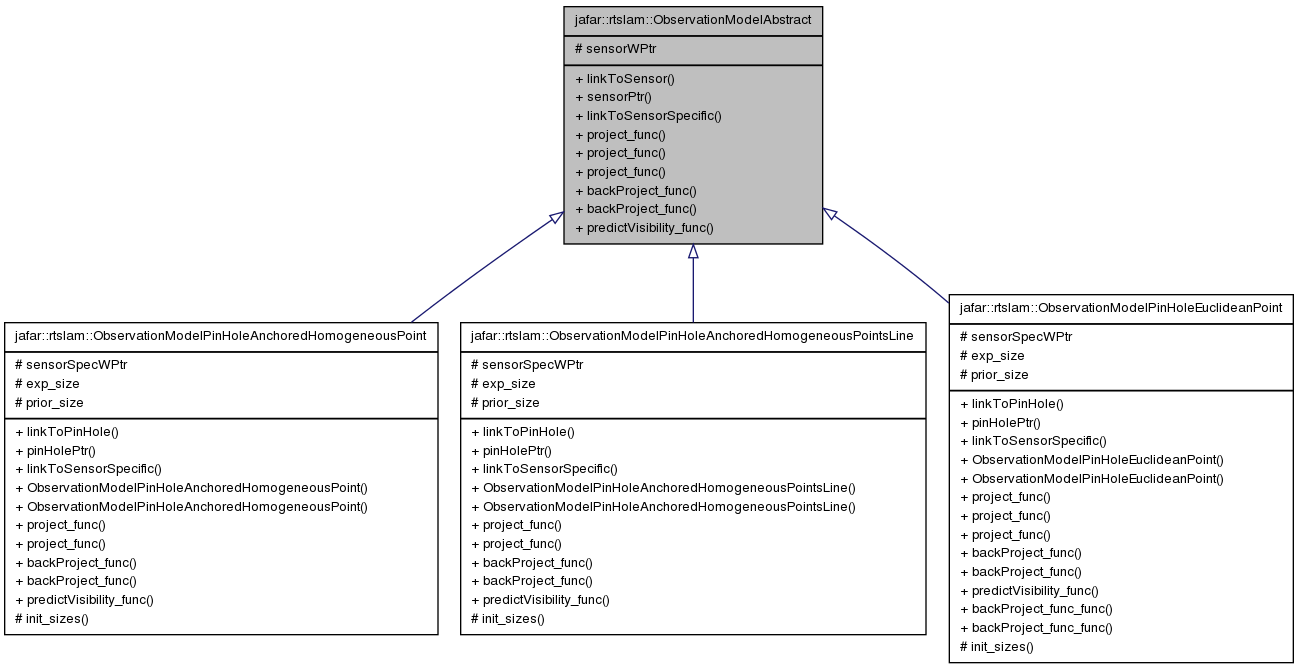
An observation model only contains pseudo-static functions A reference to the sensor is kepts because it has a lot of parameters that cannot easily be abstracted, and to avoid to cast an abstract sensor object every time. More...
An observation model only contains pseudo-static functions A reference to the sensor is kepts because it has a lot of parameters that cannot easily be abstracted, and to avoid to cast an abstract sensor object every time.
Definition at line 39 of file observationAbstract.hpp.
#include <observationAbstract.hpp>
Public Types | |
|
typedef boost::weak_ptr < SensorAbstract > | sensor_wptr_t |
Public Member Functions | |
| void | linkToSensor (sensor_ptr_t ptr) |
| sensor_ptr_t | sensorPtr (void) |
| virtual void | linkToSensorSpecific (sensor_ptr_t ptr)=0 |
| virtual void | project_func (const vec7 &sg, const vec &lmk, vec &meas, vec &nobs)=0 |
| Project. | |
| virtual void | project_func (const vec7 &sg, const vec &lmk, vec &exp, vec &nobs, mat &EXP_sg, mat &EXP_lmk)=0 |
| Project and get Jacobians. | |
| virtual void | project_func (const vec7 &sg, const vec &lmk, vec &exp, vec &nobs, mat &EXP_sg, mat &EXP_lmk, const vec lmk_fej) |
| virtual void | backProject_func (const vec7 &sg, const vec &meas, const vec &nobs, vec &lmk)=0 |
| Back-project function. | |
| virtual void | backProject_func (const vec7 &sg, const vec &meas, const vec &nobs, vec &lmk, mat &LMK_sg, mat &LMK_meas, mat &LMK_nobs)=0 |
| Back-project function. | |
| virtual bool | predictVisibility_func (jblas::vec x, jblas::vec nobs)=0 |
Protected Attributes | |
| sensor_wptr_t | sensorWPtr |
| virtual void jafar::rtslam::ObservationModelAbstract::project_func | ( | const vec7 & | sg, |
| const vec & | lmk, | ||
| vec & | meas, | ||
| vec & | nobs | ||
| ) | [pure virtual] |
Project.
This projects the landmark into the sensor space.
| sg | global sensor pose |
| lmk | landmark state vector |
| exp | expectation vector |
| nobs | non-observable vector |
Implemented in jafar::rtslam::ObservationModelPinHoleAnchoredHomogeneousPoint, jafar::rtslam::ObservationModelPinHoleAnchoredHomogeneousPointsLine, and jafar::rtslam::ObservationModelPinHoleEuclideanPoint.
| virtual void jafar::rtslam::ObservationModelAbstract::project_func | ( | const vec7 & | sg, |
| const vec & | lmk, | ||
| vec & | exp, | ||
| vec & | nobs, | ||
| mat & | EXP_sg, | ||
| mat & | EXP_lmk | ||
| ) | [pure virtual] |
Project and get Jacobians.
This projects the landmark into the sensor space, and gives the Jacobians of this projection wrt. the global sensor pose and the landmark.
| sg | global sensor pose |
| lmk | landmark state vector |
| exp | expectation vector |
| nobs | non-observable vector |
| EXP_sg | Jacobian of exp wrt sg |
| EXP_lmk | Jacobian of exp wrt lmk |
Implemented in jafar::rtslam::ObservationModelPinHoleAnchoredHomogeneousPoint, jafar::rtslam::ObservationModelPinHoleAnchoredHomogeneousPointsLine, and jafar::rtslam::ObservationModelPinHoleEuclideanPoint.
| Generated on Wed Oct 15 2014 00:37:45 for Jafar by doxygen 1.7.6.1 |

|

