|
Jafar
|
|
Jafar
|
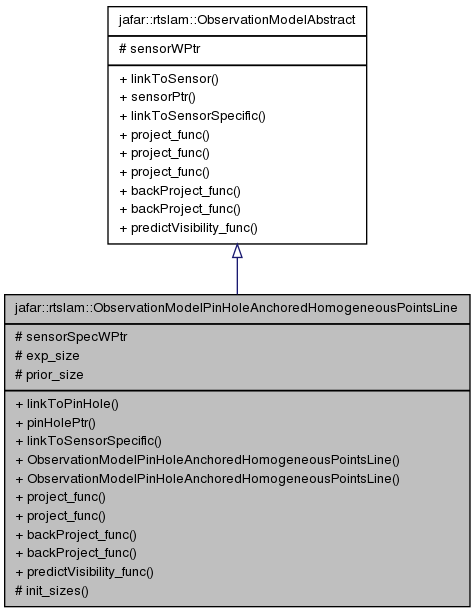
Definition at line 26 of file observationPinHoleAnchoredHomogeneousPointsLine.hpp.
Public Types | |
| typedef SensorPinhole | sensor_spec_t |
|
typedef boost::shared_ptr < sensor_spec_t > | sensor_spec_ptr_t |
|
typedef boost::weak_ptr < sensor_spec_t > | sensor_spec_wptr_t |
Public Member Functions | |
| void | linkToPinHole (sensor_spec_ptr_t ptr) |
| sensor_spec_ptr_t | pinHolePtr (void) |
| virtual void | linkToSensorSpecific (sensor_ptr_t ptr) |
| ObservationModelPinHoleAnchoredHomogeneousPointsLine (const sensor_ptr_t &pinholePtr) | |
| virtual void | project_func (const vec7 &sg, const vec &lmk, vec &meas, vec &nobs) |
| Projection function, with Jacobians and non-observable part. | |
| virtual void | project_func (const vec7 &sg, const vec &lmk, vec &meas, vec &nobs, mat &EXP_sg, mat &EXP_lmk) |
| Projection function, with Jacobians and non-observable part. | |
| virtual void | backProject_func (const vec7 &sg, const vec &meas, const vec &nobs, vec &lmk) |
| Retro-projection function, with Jacobians. | |
| virtual void | backProject_func (const vec7 &sg, const vec &meas, const vec &nobs, vec &lmk, mat &LMK_sg, mat &LMK_meas, mat &LMK_nobs) |
| Retro-projection function, with Jacobians. | |
| virtual bool | predictVisibility_func (jblas::vec x, jblas::vec nobs) |
| Predict visibility. | |
Protected Member Functions | |
| void | init_sizes () |
Protected Attributes | |
| sensor_spec_wptr_t | sensorSpecWPtr |
| size_t | exp_size |
| size_t | prior_size |
| virtual bool jafar::rtslam::ObservationModelPinHoleAnchoredHomogeneousPointsLine::predictVisibility_func | ( | jblas::vec | x, |
| jblas::vec | nobs | ||
| ) | [virtual] |
Predict visibility.
Visibility can only be established after project_func() has been called.
Implements jafar::rtslam::ObservationModelAbstract.
| Generated on Wed Oct 15 2014 00:37:45 for Jafar by doxygen 1.7.6.1 |

|

