|
Jafar
|
|
Jafar
|
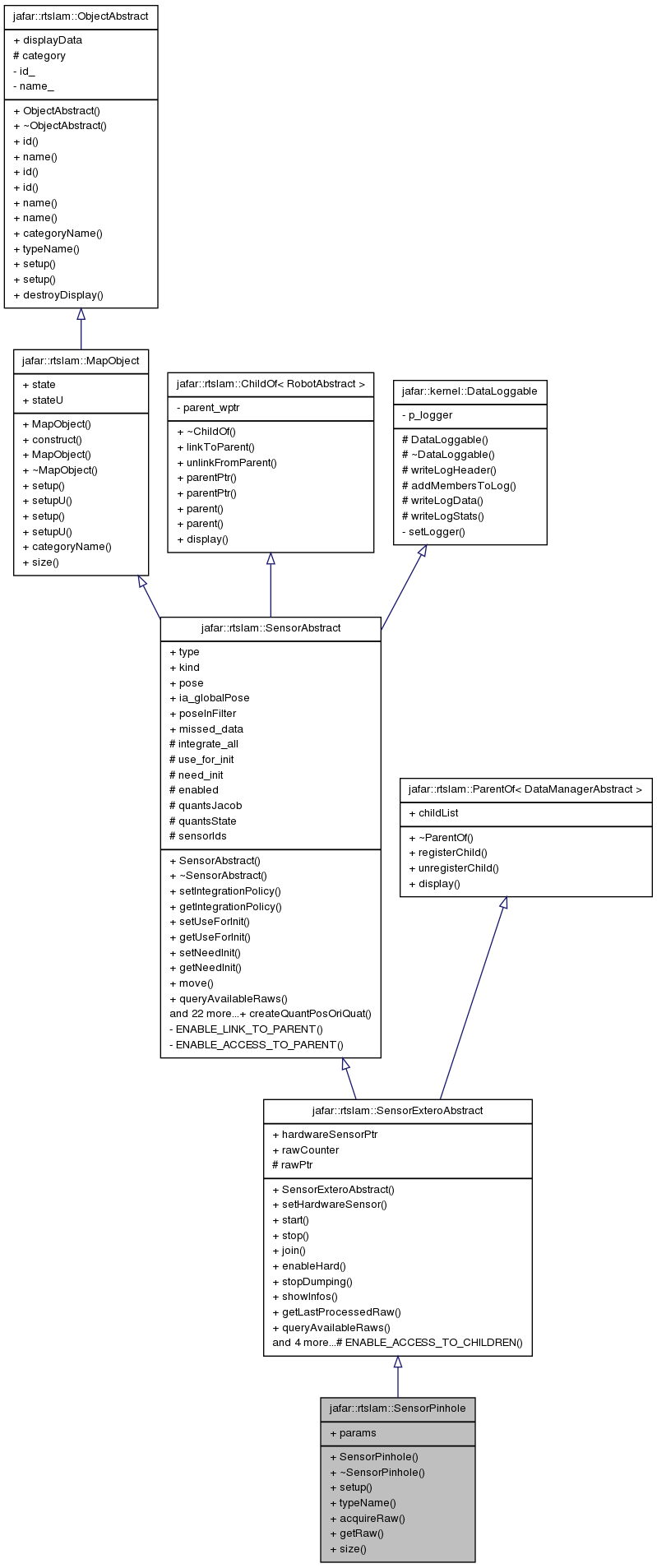
Class for pin-hole cameras. More...
Class for pin-hole cameras.
This model accepts radial distortion model
Definition at line 35 of file sensorPinhole.hpp.
#include <sensorPinhole.hpp>
Public Member Functions | |
| SensorPinhole (const robot_ptr_t &_robPtr, filtered_obj_t inFilter=UNFILTERED, int extraStateFilterSize=0) | |
| Constructor for selectable LOCAL or REMOTE pose, from robot and selector flag. | |
| void | setup (const size_t id, const string &name, const int _width, const int _height, const vec7 &pose, const vec7 &std, const jblas::vec2 &_s, const vec4 &k, const vec &d, const vec &c) |
| virtual std::string | typeName () const |
| int | acquireRaw () |
| raw_ptr_t | getRaw () |
Static Public Member Functions | |
| static size_t | size (void) |
Public Attributes | |
| SensorImageParameters | params |
| jafar::rtslam::SensorPinhole::SensorPinhole | ( | const robot_ptr_t & | _robPtr, |
| filtered_obj_t | inFilter = UNFILTERED, |
||
| int | extraStateFilterSize = 0 |
||
| ) |
Constructor for selectable LOCAL or REMOTE pose, from robot and selector flag.
| _robPtr | the robot to install to. |
| inFilter | flag indicating in the sensor pose is filtered or not. |
| Generated on Wed Oct 15 2014 00:37:46 for Jafar by doxygen 1.7.6.1 |

|

