|
Jafar
|
|
Jafar
|
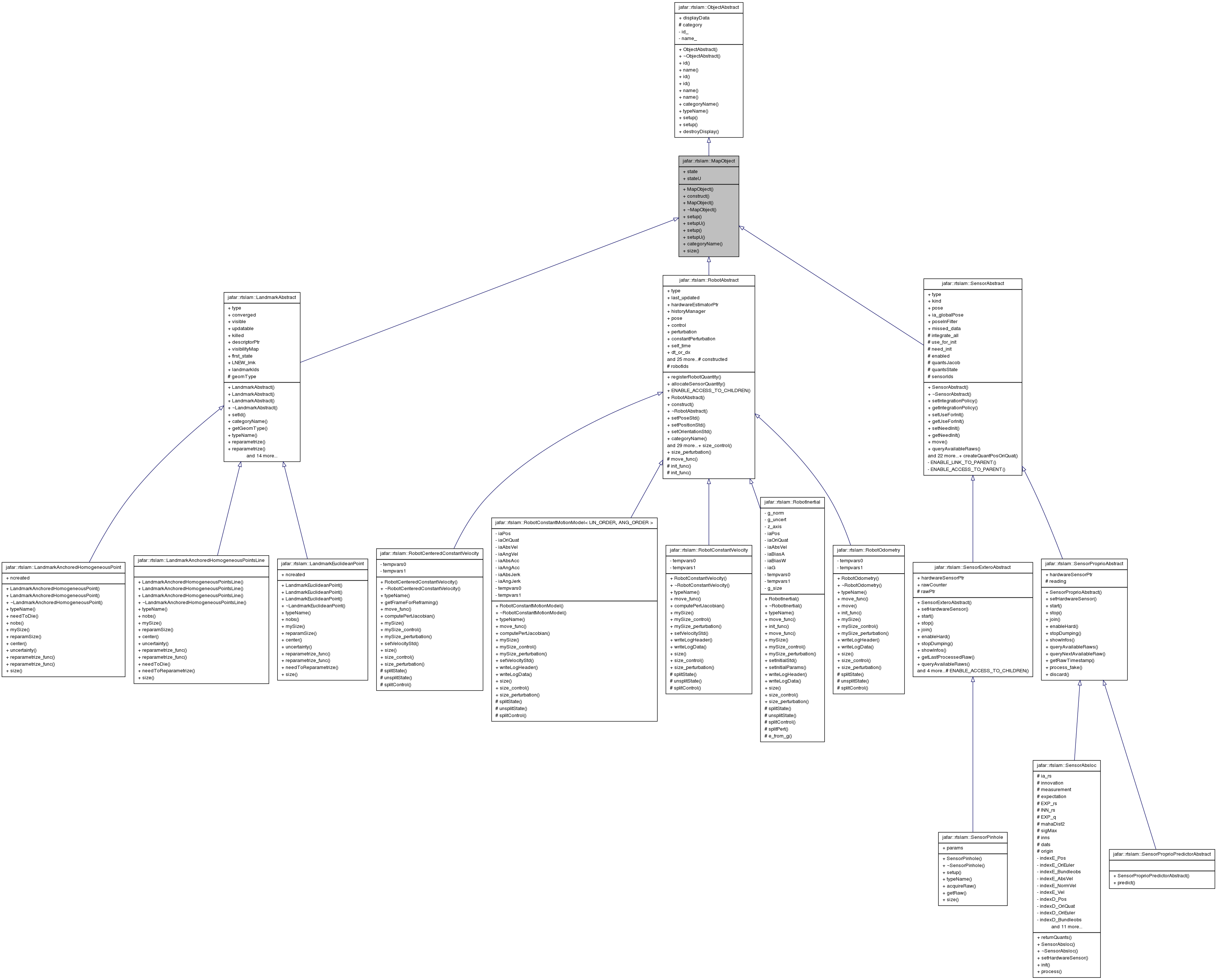
Class for generic mappable objects. More...
Class for generic mappable objects.
Definition at line 30 of file mapObject.hpp.
#include <mapObject.hpp>
Public Types | |
| enum | filtered_obj_t { FILTERED, UNFILTERED } |
| Use this enum in constructors to indicate if the object's state vector should be part of the filter. More... | |
Public Member Functions | |
| MapObject (const map_ptr_t &_mapPtr, const size_t _size, const size_t _sizeU) | |
| Selectable constructor with inFilter flag. | |
| void | construct (const map_ptr_t &_mapPtr, const size_t _size, const size_t _sizeU) |
| MapObject (const map_ptr_t &_mapPtr, const MapObject &_previousObj, const size_t _size, jblas::ind_array &_icomp) | |
| Contructor by replacement: install the new object in place of the given arguments, using the same position in the filter. | |
| virtual | ~MapObject () |
| Mandatory virtual destructor. | |
| void | setup (const vec &_state, const vec &_stateStdDev) |
| void | setupU (const vec &_state, const vec &_stateStdDev) |
| void | setup (const vec &_state, const sym_mat &_stateCov) |
| void | setupU (const vec &_state, const sym_mat &_stateCov) |
| virtual std::string | categoryName () const |
Static Public Member Functions | |
| static size_t | size () |
Public Attributes | |
| Gaussian | state |
| Part of object's state vector that is part of the SLAM filter (filtered) | |
| Gaussian | stateU |
| Part of object's state vector that is not part of the SLAM filter (unfiltered) | |
Friends | |
| std::ostream & | operator<< (std::ostream &s, MapObject const &obj) |
Use this enum in constructors to indicate if the object's state vector should be part of the filter.
| FILTERED |
Object's state vector is part of the SLAM filter. |
| UNFILTERED |
Object's state vector is not part of the SLAM filter. |
Definition at line 39 of file mapObject.hpp.
| jafar::rtslam::MapObject::MapObject | ( | const map_ptr_t & | _mapPtr, |
| const size_t | _size, | ||
| const size_t | _sizeU | ||
| ) |
Selectable constructor with inFilter flag.
| _mapPtr | pointer to map |
| _size | size of the filtered state vector |
| _sizeU | size of the unfiltered state vector |
| jafar::rtslam::MapObject::MapObject | ( | const map_ptr_t & | _mapPtr, |
| const MapObject & | _previousObj, | ||
| const size_t | _size, | ||
| jblas::ind_array & | _icomp | ||
| ) |
Contructor by replacement: install the new object in place of the given arguments, using the same position in the filter.
The previous object has to be FILTERED, so is the new object.
| _mapPtr | pointer to map _previousObj the object to be replaced in the filter. Should by FILTERED |
| _size | the new size of the state vector. |
| _icomp | the complementary of the new state wrt the previous state, ie the memory to be release when relaxing the previous object. |
| Generated on Wed Oct 15 2014 00:37:45 for Jafar by doxygen 1.7.6.1 |

|

