|
Jafar
|
|
Jafar
|
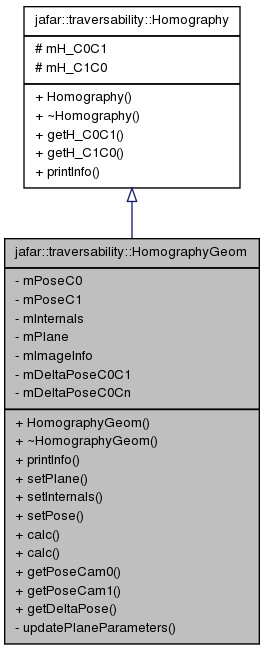
This class inherited from class Module homography and performs the calculation of an homography given the related camera poses, the intrinsic camera parameters and the plane parameters. More...
This class inherited from class Module homography and performs the calculation of an homography given the related camera poses, the intrinsic camera parameters and the plane parameters.
Definition at line 22 of file trv_homographyGeom.hpp.
#include <trv_homographyGeom.hpp>
Public Member Functions | |
| HomographyGeom (void) | |
| The constructor initializes the members as "all-zero-valued" objects. | |
| void | printInfo (void) const |
| Print some basic info about the actual configuration. | |
| void | setPlane (const PlaneParameters &plane) |
| Set the plane parameters passed in the object PlaneParameters. | |
| void | setInternals (const CameraIntrinsicParameters &internals) |
| Set the intrinsic parameters assembled in the object CameraIntrinsicParameters. | |
| void | setPose (const CameraPoseParameters &poseC0, const CameraPoseParameters &poseC1) |
| Set the pose containers of type CameraPoseParameters and calculate the object CameraDeltaParameters containing the necessary input data for method calc. | |
| void | calc (void) |
| The method calculates a homography given the pose data which have been set with the help of method setPose. | |
| void | calc (const CameraPoseParameters &poseC0, const CameraPoseParameters &poseC1) |
| This is a short cut combining setPose and calc. | |
| CameraPoseParameters | getPoseCam0 (void) const |
| CameraPoseParameters | getPoseCam1 (void) const |
| CameraDeltaParameters | getDeltaPose (void) const |
Private Member Functions | |
| void | updatePlaneParameters (void) |
| The plane parameters object contains the distances from the cameras to the plane. | |
Private Attributes | |
| CameraPoseParameters | mPoseC0 |
| CameraPoseParameters | mPoseC1 |
| CameraIntrinsicParameters | mInternals |
| PlaneParameters | mPlane |
| ImageInfo | mImageInfo |
| CameraDeltaParameters | mDeltaPoseC0C1 |
| CameraDeltaParameters | mDeltaPoseC0Cn |
| void jafar::traversability::HomographyGeom::calc | ( | const CameraPoseParameters & | poseC0, |
| const CameraPoseParameters & | poseC1 | ||
| ) |
This is a short cut combining setPose and calc.
| poseC0 | of type CameraDeltaParameters defining camera pose 0 |
| poseC1 | of type CameraDeltaParameters defining camera pose 1 |
| void jafar::traversability::HomographyGeom::setPose | ( | const CameraPoseParameters & | poseC0, |
| const CameraPoseParameters & | poseC1 | ||
| ) |
Set the pose containers of type CameraPoseParameters and calculate the object CameraDeltaParameters containing the necessary input data for method calc.
| poseC0 | of type CameraDeltaParameters defining camera pose 0 |
| poseC1 | of type CameraDeltaParameters defining camera pose 1 |
| void jafar::traversability::HomographyGeom::updatePlaneParameters | ( | void | ) | [private] |
The plane parameters object contains the distances from the cameras to the plane.
This parameter has to be updated for each new pose configuration.
| Generated on Wed Oct 15 2014 00:37:51 for Jafar by doxygen 1.7.6.1 |

|

