|
Jafar
|
|
Jafar
|
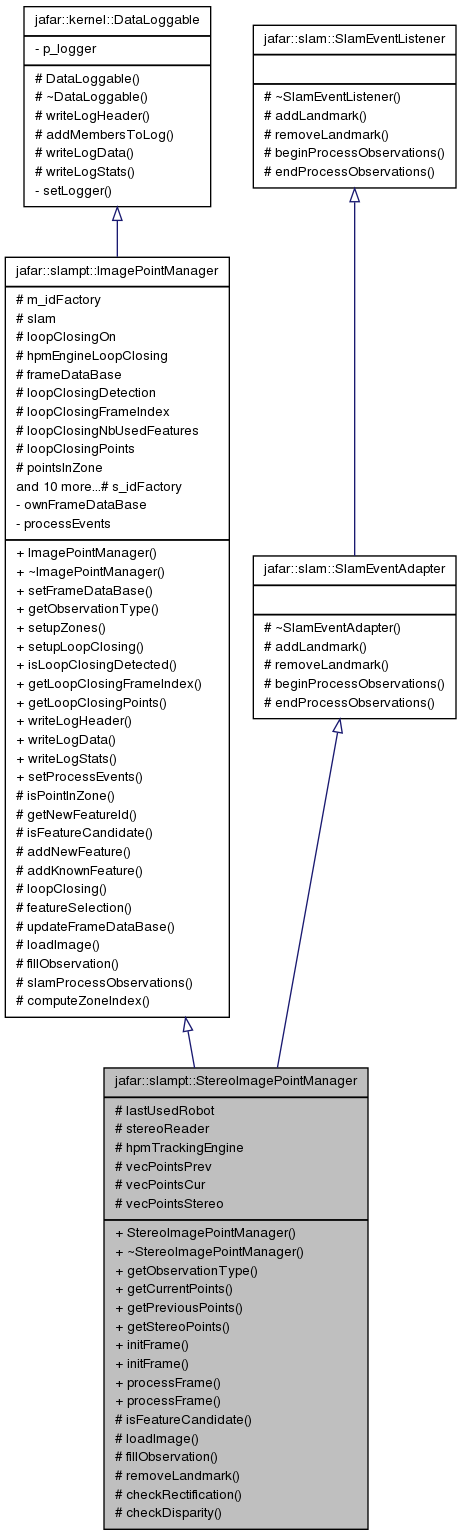
Class for stereovision slam with a stereovision bench and when features are interest points extracted from an image. More...
Class for stereovision slam with a stereovision bench and when features are interest points extracted from an image.
Definition at line 545 of file imagePointManager.hpp.
#include <imagePointManager.hpp>
Public Member Functions | |
| StereoImagePointManager (slam::BaseSlam &slam_, jafar::hpm::Engine &hpmEngineLoopClosing_, jafar::hpm::StereoTrackingEngine &hpmTrackingEngine_, jafar::datareader::StereoReader *stereoReader_, kernel::IdFactory<> *_idFactory=0) | |
| slam::Observation::ObservationType | getObservationType () const |
|
jafar::hpm::vecStereoHarrisPoints const & | getCurrentPoints () const |
|
jafar::hpm::vecStereoHarrisPoints const & | getPreviousPoints () const |
|
jafar::hpm::vecStereoHarrisPoints const & | getStereoPoints () const |
| void | initFrame (unsigned int frameIndex_, unsigned int robotId_=0, unsigned int sensorId_=0) |
| void | initFrame (unsigned int frameIndex_, jafar::image::Image *imgLeft, jafar::image::Image *imgRight, unsigned int robotId_=0, unsigned int sensorId_=0) |
| void | processFrame (unsigned int frameIndex_, unsigned int robotId_=0, unsigned int sensorId_=0) |
| void | processFrame (unsigned int frameIndex_, jafar::image::Image *imgLeft, jafar::image::Image *imgRight, unsigned int robotId_=0, unsigned int sensorId_=0) |
Protected Member Functions | |
| bool | isFeatureCandidate (std::size_t index_) |
| jafar::image::Image * | loadImage (unsigned int frameNumber) const |
| bool | fillObservation (std::size_t index_, slam::Observation &obs, unsigned int sensorId_, unsigned int robotId_) const |
| void | removeLandmark (slam::BaseFeature const &landmark) |
Static Protected Member Functions | |
| static bool | checkRectification (hpm::StereoHarrisPoint const &leftPt, hpm::StereoHarrisPoint const &rightPt) |
| static bool | checkDisparity (hpm::StereoHarrisPoint const &leftPt, hpm::StereoHarrisPoint const &rightPt) |
Protected Attributes | |
| unsigned int | lastUsedRobot |
| jafar::datareader::StereoReader * | stereoReader |
| jafar::hpm::StereoTrackingEngine & | hpmTrackingEngine |
| jafar::hpm::vecStereoHarrisPoints | vecPointsPrev |
| jafar::hpm::vecStereoHarrisPoints | vecPointsCur |
| jafar::hpm::vecStereoHarrisPoints | vecPointsStereo |
| Generated on Wed Oct 15 2014 00:37:50 for Jafar by doxygen 1.7.6.1 |

|

