|
Jafar
|
|
Jafar
|
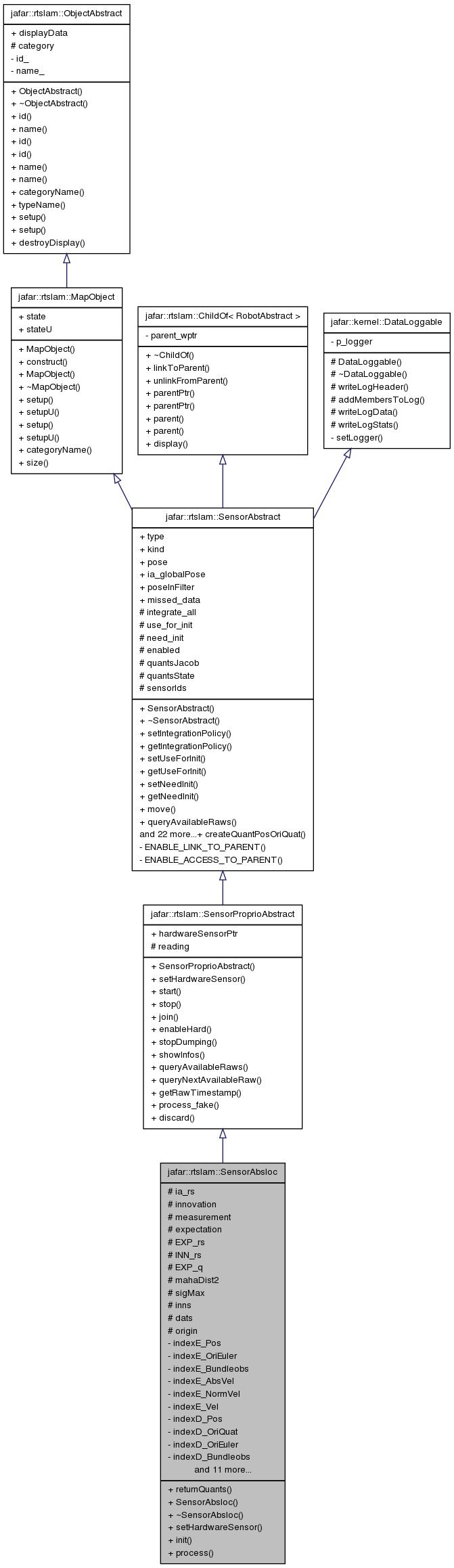
Class for absolute localization sensors (gps, motion capture...) For now we assume that we have at least one reading before images and that is is very precise. More...
Class for absolute localization sensors (gps, motion capture...) For now we assume that we have at least one reading before images and that is is very precise.
Improvements would be to start at 0,0,0 with uncertainty 0 and estimate the initial position.
Definition at line 37 of file sensorAbsloc.hpp.
#include <sensorAbsloc.hpp>
Public Member Functions | |
|
std::vector < RobotAbstract::Quantity > | returnQuants (bool needPose, bool needVel, bool needAngVel) |
| SensorAbsloc (const robot_ptr_t &robPtr, const filtered_obj_t inFilter=UNFILTERED, double mahaDist=-1.0, double sigMax=1e9, bool needPose=true, bool needVel=false, bool needAngVel=false) | |
| virtual void | setHardwareSensor (hardware::hardware_sensorprop_ptr_t hardwareSensorPtr_) |
| virtual void | init (unsigned id) |
| virtual void | process (unsigned id, double date_limit) |
| process the given raw and throw away the previous unprocessed ones | |
Protected Attributes | |
| jblas::ind_array | ia_rs |
| Innovation * | innovation |
| Measurement * | measurement |
| Expectation * | expectation |
| jblas::mat | EXP_rs |
| jblas::mat | INN_rs |
| jblas::mat | EXP_q |
| double | mahaDist2 |
| double | sigMax |
| int | inns |
| int | dats |
| innovation size | |
| jblas::vec | origin |
| data size | |
Private Attributes | |
| size_t | indexE_Pos |
| size_t | indexE_OriEuler |
| size_t | indexE_Bundleobs |
| size_t | indexE_AbsVel |
| size_t | indexE_NormVel |
| size_t | indexE_Vel |
| int | indexD_Pos |
| indexes in expectation | |
| int | indexD_OriQuat |
| int | indexD_OriEuler |
| int | indexD_Bundleobs |
| int | indexD_AbsVel |
| int | indexD_NormVel |
| int | indexD_Vel |
| ublas::range | indexR_Pos |
| indexes in sensor's data | |
| ublas::range | indexR_OriQuat |
| ublas::range | indexR_AbsVel |
| ublas::range | indexR_AngVel |
| ublas::range | indexJ_Pos |
| indexes in robot's full state | |
| ublas::range | indexJ_OriQuat |
| ublas::range | indexJ_AbsVel |
| ublas::range | indexJ_AngVel |
| hardware::HardwareSensorProprioAbstract::CovType | covType |
| indexes in robot's jacobian | |
| virtual void jafar::rtslam::SensorAbsloc::process | ( | unsigned | id, |
| double | date_limit | ||
| ) | [inline, virtual] |
process the given raw and throw away the previous unprocessed ones
Implements jafar::rtslam::SensorAbstract.
Definition at line 168 of file sensorAbsloc.hpp.
References dats, jafar::rtslam::quaternion::e2q(), indexD_Pos, indexJ_Pos, jafar::rtslam::Innovation::iP_, JFR_ASSERT, jafar::jmath::ublasExtra::lu_inv(), jafar::rtslam::Innovation::mahalanobis(), jafar::jmath::ublasExtra::normalize(), jafar::jmath::ublasExtra::normalizeJac(), jafar::rtslam::SensorAbstract::pose, jafar::jmath::ublasExtra::prod_JPJt(), jafar::rtslam::quaternion::q2e(), jafar::rtslam::quaternion::q2qc(), jafar::rtslam::quaternion::qProd(), jafar::rtslam::quaternion::qProd_by_dq1(), jafar::rtslam::quaternion::rotate(), jafar::rtslam::quaternion::rotate_by_dq(), jafar::rtslam::MapObject::state, and jafar::rtslam::SensorAbstract::use_for_init.
jblas::vec jafar::rtslam::SensorAbsloc::origin [protected] |
data size
origin of this sensor's frame reference wrt the frame reference exported
Definition at line 50 of file sensorAbsloc.hpp.
| Generated on Wed Oct 15 2014 00:37:46 for Jafar by doxygen 1.7.6.1 |

|

