|
Jafar
|
|
Jafar
|
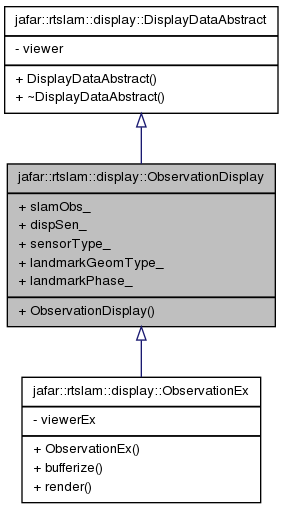
************************************************************************** This is the base class for observation objects that will store display data for a viewer. More...
************************************************************************** This is the base class for observation objects that will store display data for a viewer.
When writing a new viewer, you must create a type that inherits from this.
Definition at line 143 of file display.hpp.
#include <display.hpp>
Public Member Functions | |
| ObservationDisplay (ViewerAbstract *viewer_, rtslam::ObservationAbstract *_slamObs, SensorDisplay *_dispSen) | |
Public Attributes | |
| rtslam::ObservationAbstract * | slamObs_ |
| SensorDisplay * | dispSen_ |
| SensorAbstract::type_enum | sensorType_ |
| LandmarkDisplay::Type | landmarkGeomType_ |
| LandmarkDisplay::Phase | landmarkPhase_ |
| Generated on Wed Oct 15 2014 00:37:46 for Jafar by doxygen 1.7.6.1 |

|

