|
Jafar
|
|
Jafar
|
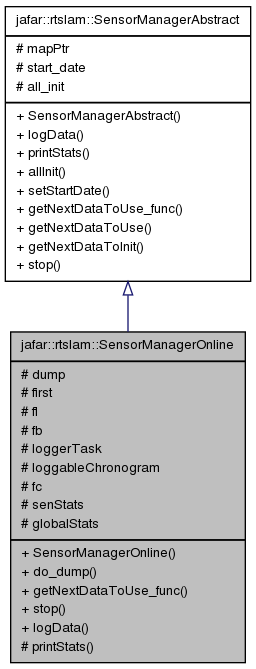
This sensor managers tries to integrate several sensors according to their policy (all or latest) More...
This sensor managers tries to integrate several sensors according to their policy (all or latest)
General idea:
If data dump is performed and perfect replay may be needed afterwards, dump_file should be provided to save which and in which order were data integrated.
Definition at line 304 of file sensorManager.hpp.
#include <sensorManager.hpp>
Classes | |
| struct | GlobalStats |
| class | LoggableChronogram |
| class | LoggableReplay |
| class | LoggableReplayInitialState |
| struct | SenInfo |
| struct | SenStats |
Public Member Functions | |
| SensorManagerOnline (map_ptr_t mapPtr, std::string dump_path="", kernel::LoggerTask *loggerTask=NULL) | |
| void | do_dump (ProcessInfo const &info, int missed) |
| virtual ProcessInfo | getNextDataToUse_func (double currentTime) |
| virtual void | stop () |
| virtual void | logData (sensor_ptr_t sen, double start_date, double waitedmove_date, double moved_date, double processed_date) |
Protected Member Functions | |
| void | printStats () |
Protected Attributes | |
| bool | dump |
| bool | first |
| std::fstream | fl |
| std::fstream | fb |
| kernel::LoggerTask * | loggerTask |
| LoggableChronogram * | loggableChronogram |
| std::fstream | fc |
| std::map< int, SenStats > | senStats |
|
struct jafar::rtslam::SensorManagerOnline::GlobalStats | globalStats |
| Generated on Wed Oct 15 2014 00:37:46 for Jafar by doxygen 1.7.6.1 |

|

