|
Jafar
|
|
Jafar
|
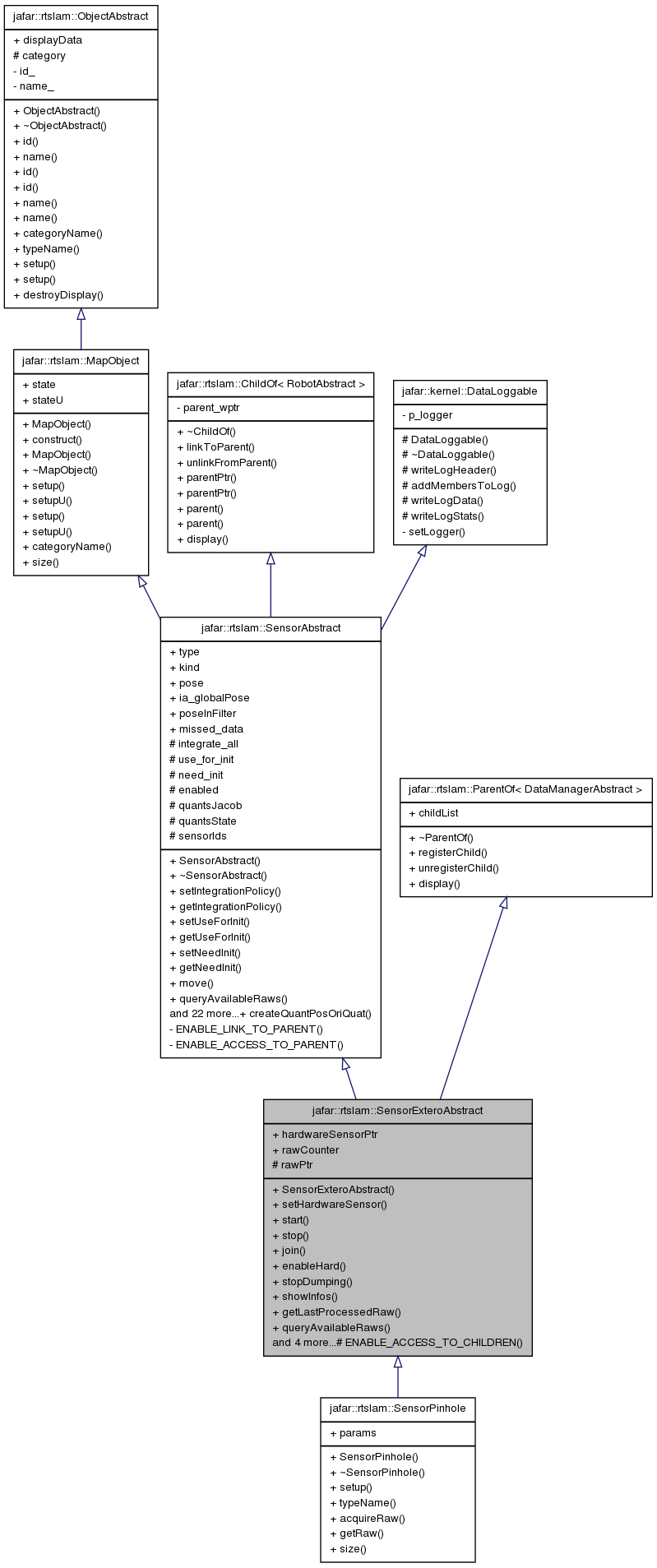
Base class for exteroceptive sensors (that need to map the environment) (cameras, lasers, ...) More...
Base class for exteroceptive sensors (that need to map the environment) (cameras, lasers, ...)
Definition at line 255 of file sensorAbstract.hpp.
#include <sensorAbstract.hpp>
Public Member Functions | |
| SensorExteroAbstract (const robot_ptr_t &robPtr, const filtered_obj_t poseInFilter=UNFILTERED, int extraStateFilterSize=0) | |
| void | setHardwareSensor (hardware::hardware_sensorext_ptr_t hardwareSensorPtr_) |
| virtual void | start () |
| virtual void | stop () |
| virtual bool | join (int timed_ms=-1) |
| virtual void | enableHard (bool enabled=true) |
| virtual void | stopDumping () |
| virtual void | showInfos () |
| virtual raw_ptr_t | getLastProcessedRaw () |
| virtual int | queryAvailableRaws (RawInfos &infos) |
| get information about the available raws and the estimated dates for next one | |
| virtual int | queryNextAvailableRaw (RawInfo &info) |
| get information about the next available raw | |
| virtual double | getRawTimestamp (unsigned id) |
| void | process (unsigned id, double date_limit=-1.) |
| process the given raw and throw away the previous unprocessed ones | |
| void | process_fake (unsigned id, bool move) |
| don't do any predict or update, but let the data acquisition run smoothly | |
| void | discard (unsigned id) |
| discard a data without using it | |
Public Attributes | |
| hardware::hardware_sensorext_ptr_t | hardwareSensorPtr |
| unsigned | rawCounter |
Protected Member Functions | |
| ENABLE_ACCESS_TO_CHILDREN (DataManagerAbstract, DataManager, dataManager) | |
Protected Attributes | |
| raw_ptr_t | rawPtr |
| void jafar::rtslam::SensorExteroAbstract::process | ( | unsigned | id, |
| double | date_limit = -1. |
||
| ) | [virtual] |
process the given raw and throw away the previous unprocessed ones
Implements jafar::rtslam::SensorAbstract.
| Generated on Wed Oct 15 2014 00:37:46 for Jafar by doxygen 1.7.6.1 |

|

