|
Jafar
|
|
Jafar
|
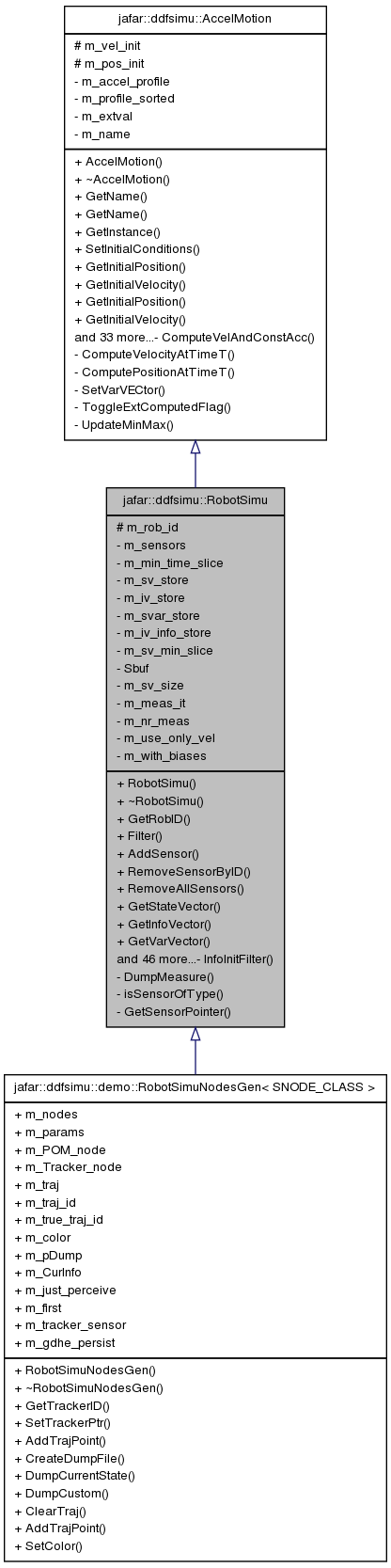
This is the main class for robot simulation. More...
This is the main class for robot simulation.
Sensors can be connected to the robot and the simulation generates the measures
Definition at line 27 of file robotsimu.hpp.
#include <robotsimu.hpp>
Classes | |
| class | SortedBufferItem |
Public Types | |
| enum | SORT_STAMP_TYPE { SORT_STAMP_SENSED, SORT_STAMP_AVAILABLE } |
|
typedef std::multiset < SortedBufferItem > | SortedBuffer |
Public Member Functions | |
| RobotSimu (unsigned short sv_size, std::string name, bool use_only_vel=false, bool use_biases=false) | |
| unsigned short | GetRobID () const |
| void | Filter (bool with_biases) |
| void | AddSensor (SensorSimuBase *sensor) |
| void | RemoveSensorByID (unsigned short id) |
| void | RemoveAllSensors () |
| MeasureItem const & | GetStateVector (unsigned short idx) const |
| MeasureItem const & | GetInfoVector (unsigned short idx) const |
| MeasureItem const & | GetVarVector (unsigned short idx) const |
| MeasureItem const & | GetInfoMatVector (unsigned short idx) const |
| unsigned short | GetSvSize () |
| bool | HasBias () |
| bool | UseOnlyVel () |
| unsigned short | GetStatesNr () |
| void | SimulatePropPerception () |
| void | SimulateExtPerception (RobotSimu &other_rob) |
| void | SimulateAll (RobotSimu &other_rob) |
| void | FillUpMeasurementSet (SORT_STAMP_TYPE stmp_type) |
| void | ClearUpMeasurementSet () |
| void | ClearAllSensorsMeasurements () |
| void | InitStampJitter (time const &jitter) |
| short | GetCurrentSensorID () const |
| SensorSimuBase * | GetCurrentSensorPointer () const |
| SortedBuffer::iterator | GetCurrentIterator () const |
| SENSOR_TYPE | GetCurrentSensorType () const |
| time | GetCurrentLastSensed () const |
| int | GetCurrentTriggerNodeID () |
| bool | IsCurrentTriggerUpdatePOM () |
| time | GetCurrentRelTime () |
| time const & | GetCurrentSensorPeriod () const |
| bool | GetCurrentInfo (InfoContainer &meas) |
| MeasureItem const & | GetCurrentMeasure () const |
| bool | GetNextInfo (InfoContainer &meas) |
| void | ResetCounter () |
| bool | IncCounter () |
| bool | EndBuf () |
| void | DumpAllMeasures (const char *fname) |
| void | DumpTruth (const char *fname) |
| void | DumpSensor (const char *fname, unsigned short rank) |
| void | DumpSensorByID (const char *fname, unsigned short id) |
| unsigned short | GetNrMeas () |
| unsigned short | GetSensorID (unsigned short rank_in_array) |
| std::string | GetSensorName (unsigned short rank_in_array) |
| unsigned short | GetNumSensors () |
| void | ListAllSensors () |
| void | ListSensorsOfType (SENSOR_TYPE type) |
| template<typename T > | |
| T * | GetSensorOfType (unsigned short rank) |
| unsigned short | GetNumSensorsOfType (SENSOR_TYPE type) |
| int | GetSensorID (SENSOR_TYPE type, unsigned short rank) |
| void | PrintRobot () |
| void | SearchMinTimeSlice () |
| double | GetMinTimeSlice () const |
| unsigned short | GetMinSamplesNr () const |
| void | PerceiveWithPropSensor (SensorSimuBase &sensor) |
| SensorBase * | GetSensorByID (unsigned short id) |
| void | ResetSensorsGetNext () |
Protected Attributes | |
| unsigned short | m_rob_id |
Private Types | |
|
typedef std::vector < SensorSimuBase * > | Sensors |
| typedef std::vector< MeasureItem > | FilterStateStorage |
Private Member Functions | |
| void | InfoInitFilter (Bayesian_filter::Information_scheme &info_scheme, unsigned short sv_size, bool with_biases) |
| void | DumpMeasure (unsigned short nb, MeasureItem const &meas, std::ofstream &stream) const |
| bool | isSensorOfType (SensorSimuBase *sensor, SENSOR_TYPE type) |
| SensorSimuBase * | GetSensorPointer (unsigned short rank) |
Private Attributes | |
| Sensors | m_sensors |
| double | m_min_time_slice |
| FilterStateStorage | m_sv_store |
| FilterStateStorage | m_iv_store |
| FilterStateStorage | m_svar_store |
| FilterStateStorage | m_iv_info_store |
| double | m_sv_min_slice |
| SortedBuffer | Sbuf |
| unsigned short | m_sv_size |
| SortedBuffer::iterator | m_meas_it |
| unsigned short | m_nr_meas |
| bool | m_use_only_vel |
| bool | m_with_biases |
| Generated on Wed Oct 15 2014 00:37:34 for Jafar by doxygen 1.7.6.1 |

|

