|
Jafar
|
|
Jafar
|
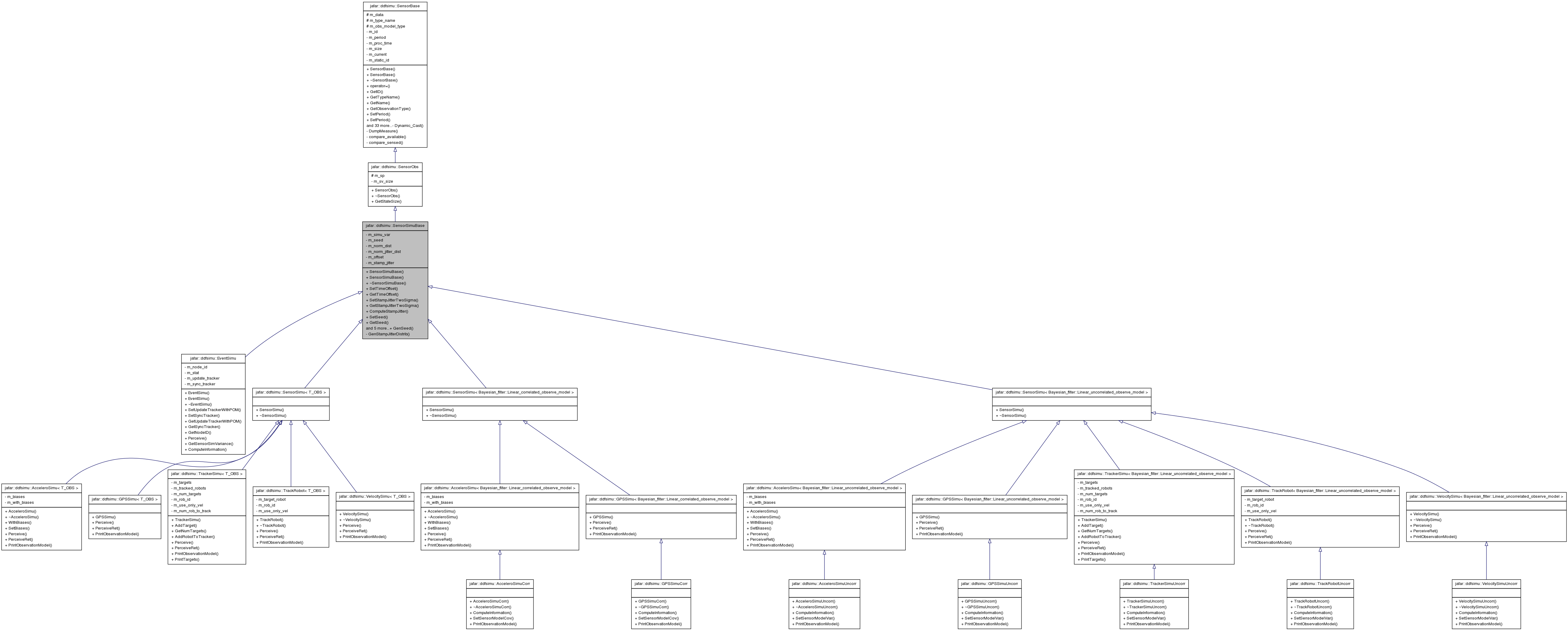
Base class for all the simulated sensors. More...
Base class for all the simulated sensors.
Definition at line 19 of file sensorsimu.hpp.
#include <sensorsimu.hpp>
Public Member Functions | |
| SensorSimuBase (unsigned short x_size, unsigned short z_size) | |
| SensorSimuBase (SensorSimuBase const &other) | |
| void | SetTimeOffset (time const &offset) |
| time | GetTimeOffset () const |
| void | SetStampJitterTwoSigma (time const &jitter) |
| time | GetStampJitterTwoSigma () |
| time | ComputeStampJitter () |
| void | SetSeed (unsigned short sens_id) |
| long unsigned int | GetSeed () |
| void | SetSensorSimVariance (VEC const &var) |
| VEC | GetSensorSimVariance () const |
| void | AddSensorNoise (VEC &measure) |
| void | AddMeasurementWithNoise (time sensed, time available, VEC &data) |
| virtual void | Perceive (VEC const &proc_state, time t)=0 |
| performs a noisy measurement of the true state at time t and add it to the measurement list of the sensor | |
| virtual void | ComputeInformation (VEC const &z, VEC &i, MSYM &I)=0 |
| Compute i and I based on the measurement vector. | |
Static Public Member Functions | |
| static long unsigned int | GenSeed (unsigned short id) |
Private Member Functions | |
| void | GenStampJitterDistrib () |
Private Attributes | |
| VEC | m_simu_var |
| vector containing the variances for the measurements | |
| long unsigned int | m_seed |
| MultiDimNormalDistribution * | m_norm_dist |
| MultiDimNormalDistribution * | m_norm_jitter_dist |
| time | m_offset |
| time | m_stamp_jitter |
| Generated on Wed Oct 15 2014 00:37:34 for Jafar by doxygen 1.7.6.1 |

|

