|
Jafar
|
|
Jafar
|
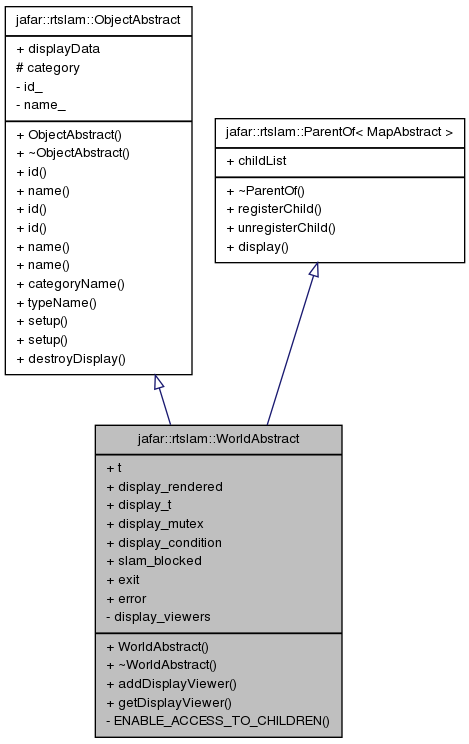
Base class for all world types defined in the module rtslam. More...
Base class for all world types defined in the module rtslam.
Definition at line 43 of file worldAbstract.hpp.
#include <worldAbstract.hpp>
Public Member Functions | |
| WorldAbstract () | |
| Constructor. | |
| virtual | ~WorldAbstract () |
| Mandatory virtual destructor - Map is used as-is, non-abstract by now. | |
| void | addDisplayViewer (display::ViewerAbstract *viewer, unsigned id) |
| display::ViewerAbstract * | getDisplayViewer (unsigned id) |
Public Attributes | |
| unsigned | t |
| bool | display_rendered |
| unsigned | display_t |
| boost::mutex | display_mutex |
| boost::condition_variable | display_condition |
| kernel::VariableMutex< bool > | slam_blocked |
| kernel::VariableMutex< bool > | exit |
| ErrorType | error |
Private Member Functions | |
| ENABLE_ACCESS_TO_CHILDREN (MapAbstract, Map, map) | |
Private Attributes | |
|
std::vector < display::ViewerAbstract * > | display_viewers |
| Generated on Wed Oct 15 2014 00:37:46 for Jafar by doxygen 1.7.6.1 |

|

