|
Jafar
|
|
Jafar
|
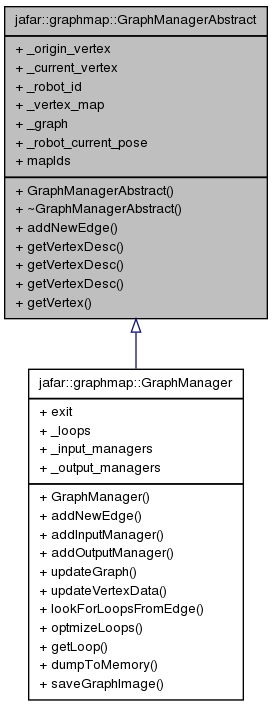
Definition at line 14 of file graphManagerAbstract.hpp.
Public Types | |
|
typedef boost::adjacency_list < boost::setS, boost::vecS, boost::bidirectionalS, Vertex_Properties, Edge_Properties, Graph_Properties > | Graph |
|
typedef boost::graph_traits < Graph >::vertex_descriptor | vertex_descriptor |
|
typedef boost::graph_traits < Graph >::edge_descriptor | edge_descriptor |
|
typedef kernel::IdFactory < MapId, kernel::IdCollectorNone > | IdFactory |
Public Member Functions | |
| GraphManagerAbstract (RobotId robotId) | |
| virtual bool | addNewEdge (RobotId from_robot, MapId from_map, RobotId to_robot, MapId to_map, Transformation t)=0 |
| vertex_descriptor | getVertexDesc (const RobotId &rob_id, const MapId &map_id) |
| Get the Vertex descriptor from the robot and map IDs. | |
| vertex_descriptor | getVertexDesc (const MapId &map_id) |
| Reimplementation to get a vertex descriptor from a map ID of this robot. | |
| vertex_descriptor | getVertexDesc (const Vertex &v_id) |
| Reimplementation to get a vertex descriptor from VertexId. | |
| Vertex | getVertex (const vertex_descriptor &desc) |
| Return a VertexId given a vertex descriptor. | |
Public Attributes | |
| vertex_descriptor | _origin_vertex |
| vertex_descriptor | _current_vertex |
| RobotId | _robot_id |
|
std::map< Vertex, vertex_descriptor > | _vertex_map |
| Graph | _graph |
| Transformation | _robot_current_pose |
Static Public Attributes | |
| static IdFactory | mapIds |
| Vertex jafar::graphmap::GraphManagerAbstract::getVertex | ( | const vertex_descriptor & | desc | ) |
Return a VertexId given a vertex descriptor.
| vertex_descriptor jafar::graphmap::GraphManagerAbstract::getVertexDesc | ( | const RobotId & | rob_id, |
| const MapId & | map_id | ||
| ) |
Get the Vertex descriptor from the robot and map IDs.
If there is no descriptor associated with the pair of IDs the method adds a new vertex with the IDs and return its descriptor.
| Generated on Wed Oct 15 2014 00:37:39 for Jafar by doxygen 1.7.6.1 |

|

