Detailed Description
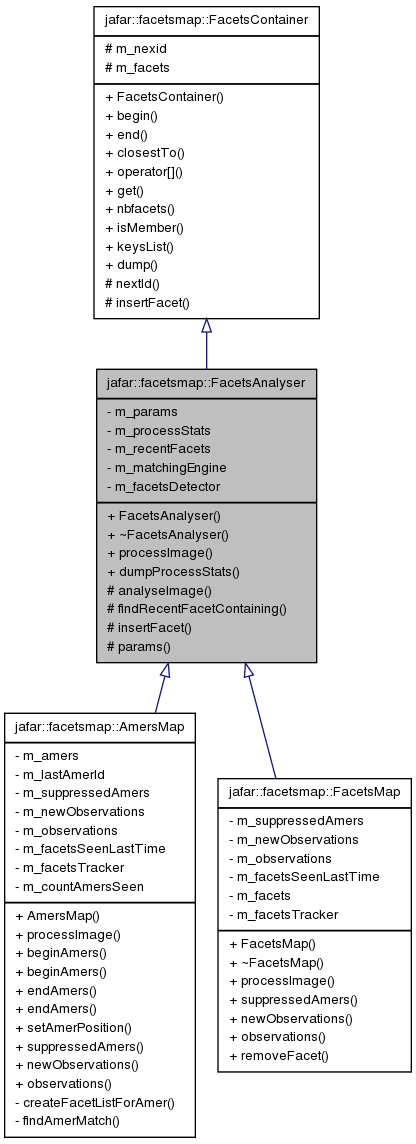
Definition at line 34 of file facetsanalyser.hpp.
List of all members.
Public Member Functions |
|
| FacetsAnalyser (const FacetsParams *params) |
| virtual void | processImage (jblas::mat44 &robotpos, jblas::mat44 &robotmovement, const boost::numeric::ublas::bounded_matrix< double, 4, 4 > &leftToRight, const jafar::image::Image &imgl, const jafar::image::Image &imgr, const jafar::camera::StereoBench &stereoBench, int time, bool updateFacet, std::map< int, jblas::vec > predictions)=0 |
| | You need to implement this function.
|
|
void | dumpProcessStats () |
| | This function display on the screen all the stats of the processing.
|
Protected Member Functions |
| vFacets | analyseImage (const jafar::image::Image &imgl, const jafar::image::Image &imgr, const camera::StereoBench &stereoBench, int time, bool updateFacet) |
| | This function is called by processImage to get the lists of new facets, all the facets that are found are stored in m_recentFacets.
|
| Facet * | findRecentFacetContaining (jblas::vec3 v) |
| | This function return a facet containing the point v, the function only look in the recents facets.
|
| void | insertFacet (uint id, Facet *f, bool lookneigh=false) |
| | This function insert a facet, and look for its neighborhood.
|
|
const FacetsParams * | params () |
Private Attributes |
|
const FacetsParams * | m_params |
|
std::vector< ProcessStats > | m_processStats |
|
vFacets | m_recentFacets |
|
gfm::Engine * | m_matchingEngine |
|
FacetsDetector * | m_facetsDetector |
Member Function Documentation
This function is called by processImage to get the lists of new facets, all the facets that are found are stored in m_recentFacets.
- Returns:
- the list of new facets
This function return a facet containing the point v, the function only look in the recents facets.
- Parameters:
-
| v | must given in the global repere |
This function insert a facet, and look for its neighborhood.
- Parameters:
-
| id | the identifiant of the facet (should be equal to f->id()) |
| f | a pointer to the facet |
| lookneigh | tells the function if we need to look for the facets which might be close to the facet we are adding |
Reimplemented from jafar::facetsmap::FacetsContainer.
Definition at line 67 of file facetsanalyser.hpp.
| virtual void jafar::facetsmap::FacetsAnalyser::processImage |
( |
jblas::mat44 & |
robotpos, |
|
|
jblas::mat44 & |
robotmovement, |
|
|
const boost::numeric::ublas::bounded_matrix< double, 4, 4 > & |
leftToRight, |
|
|
const jafar::image::Image & |
imgl, |
|
|
const jafar::image::Image & |
imgr, |
|
|
const jafar::camera::StereoBench & |
stereoBench, |
|
|
int |
time, |
|
|
bool |
updateFacet, |
|
|
std::map< int, jblas::vec > |
predictions |
|
) |
| [pure virtual] |
The documentation for this class was generated from the following file: