|
Jafar
|
|
Jafar
|
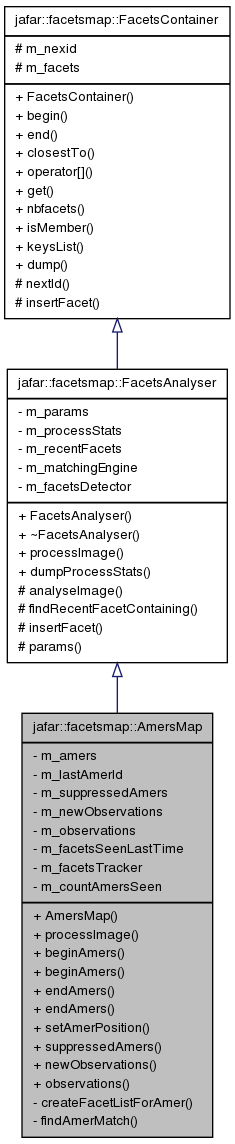
Definition at line 13 of file AmersMap.hpp.
Classes | |
| struct | AmerCandidat |
Public Member Functions | |
| AmersMap (const FacetsParams *params, const jafar::camera::StereoBench &stereoBench) | |
| virtual void | processImage (jblas::mat44 &robotpos, jblas::mat44 &robotmovement, const boost::numeric::ublas::bounded_matrix< double, 4, 4 > &leftToRight, const jafar::image::Image &imgl, const jafar::image::Image &imgr, const jafar::camera::StereoBench &stereoBench, int time, bool updateFacet, std::map< int, jblas::vec > predictions) |
| You need to implement this function. | |
| vAmers::const_iterator | beginAmers () const |
| vAmers::iterator | beginAmers () |
| vAmers::const_iterator | endAmers () const |
| vAmers::iterator | endAmers () |
| void | setAmerPosition (int id, jblas::vec_range const &) |
| const std::vector< int > & | suppressedAmers () const |
|
const std::vector < AmerObservation > & | newObservations () const |
|
const std::vector < AmerObservation > & | observations () const |
Private Member Functions | |
| vFacets | createFacetListForAmer (double x, double y, vFacets facets) |
| This function create a list of facets that might be part of an amer. | |
| AmerCandidat * | findAmerMatch (const jblas::mat44 &robotpos, Facet *match, vFacets &candidats, int time) |
| This function try to match an amer with a facet we are trying to match. | |
Private Attributes | |
| vAmers | m_amers |
| int | m_lastAmerId |
| std::vector< int > | m_suppressedAmers |
| std::vector< AmerObservation > | m_newObservations |
| std::vector< AmerObservation > | m_observations |
| vFacets | m_facetsSeenLastTime |
| FacetsTracker * | m_facetsTracker |
| int | m_countAmersSeen |
| AmerCandidat* jafar::facetsmap::AmersMap::findAmerMatch | ( | const jblas::mat44 & | robotpos, |
| Facet * | match, | ||
| vFacets & | candidats, | ||
| int | time | ||
| ) | [private] |
This function try to match an amer with a facet we are trying to match.
| match | facet that we try to match |
| candidats | vector of facets which are expressed in the same repere as the match facets and which can be use in the match processing |
| virtual void jafar::facetsmap::AmersMap::processImage | ( | jblas::mat44 & | robotpos, |
| jblas::mat44 & | robotmovement, | ||
| const boost::numeric::ublas::bounded_matrix< double, 4, 4 > & | leftToRight, | ||
| const jafar::image::Image & | imgl, | ||
| const jafar::image::Image & | imgr, | ||
| const jafar::camera::StereoBench & | stereoBench, | ||
| int | time, | ||
| bool | updateFacet, | ||
| std::map< int, jblas::vec > | predictions | ||
| ) | [virtual] |
You need to implement this function.
| robotpos | the estimated movement of the robot |
| im3d | the result of the stereovision |
| points | a vector of Harris point |
| img | the image |
Implements jafar::facetsmap::FacetsAnalyser.
| Generated on Wed Oct 15 2014 00:37:35 for Jafar by doxygen 1.7.6.1 |

|

