|
Jafar
|
|
Jafar
|
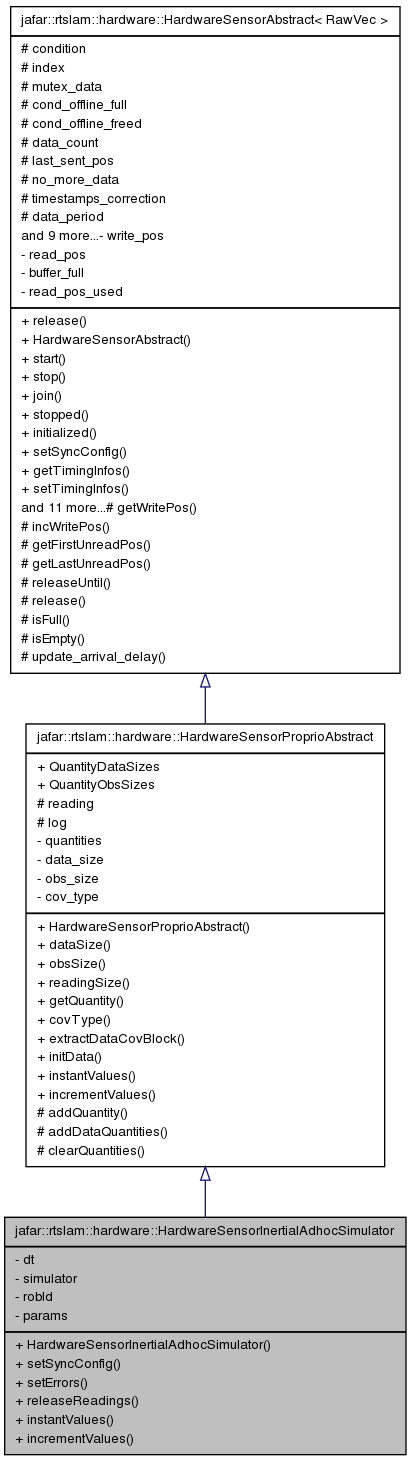
Definition at line 27 of file hardwareSensorInertialAdhocSimulator.hpp.
Classes | |
| struct | estimator_params_t |
Public Member Functions | |
| HardwareSensorInertialAdhocSimulator (kernel::VariableCondition< int > *condition, double freq, int bufferSize_, boost::shared_ptr< simu::AdhocSimulator > simulator, size_t robId) | |
| void | setSyncConfig (double timestamps_correction=0.0) |
| void | setErrors (double gravity=9.81, double gyr_bias=0.0, double gyr_bias_noisestd=0.0, double gyr_gain=1.0, double gyr_gain_noisestd=0.0, double gyr_noisestd=0.0, double acc_bias=0.0, double acc_bias_noisestd=0.0, double acc_gain=1.0, double acc_gain_noisestd=0.0, double acc_noisestd=0.0) |
| void | releaseReadings () |
| jblas::ind_array | instantValues () |
| This function must return the indices of values returned by acquireReadings that represent the instant value of a physical quantity (speed, acceleration, ...) (except first column which is time) These values will typically be integrated. | |
| jblas::ind_array | incrementValues () |
| This function must return the indices of values returned by acquireReadings that represent the increment of a physical quantity since last reading (odometry, ...) | |
Private Attributes | |
| double | dt |
|
boost::shared_ptr < simu::AdhocSimulator > | simulator |
| size_t | robId |
|
struct jafar::rtslam::hardware::HardwareSensorInertialAdhocSimulator::estimator_params_t | params |
| jafar::rtslam::hardware::HardwareSensorInertialAdhocSimulator::HardwareSensorInertialAdhocSimulator | ( | kernel::VariableCondition< int > * | condition, |
| double | freq, | ||
| int | bufferSize_, | ||
| boost::shared_ptr< simu::AdhocSimulator > | simulator, | ||
| size_t | robId | ||
| ) | [inline] |
| freq | the acquisition, must be a multiple of sensor frequence if you want to simulate synchronization |
| bufferSize_ | |
| simulator | |
| robId |
Definition at line 60 of file hardwareSensorInertialAdhocSimulator.hpp.
| Generated on Wed Oct 15 2014 00:37:47 for Jafar by doxygen 1.7.6.1 |

|

