|
Jafar
|
|
Jafar
|
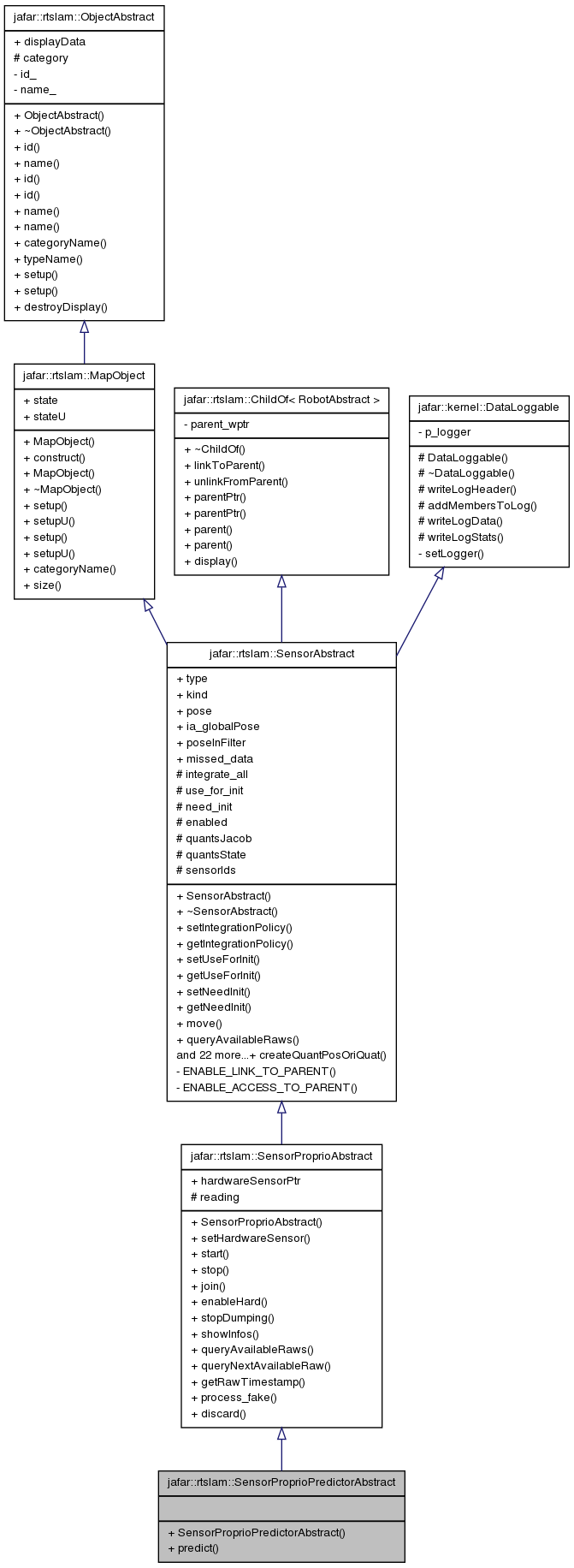
Base class for proprioceptive sensors that can be used for filter prediction step. More...
Base class for proprioceptive sensors that can be used for filter prediction step.
They must be able to predict the full pose, and be faster than all other sensors used as observations or easily interpolated to simulate it. Usually a movement model (eg constant velocity), odometry, 6D IMU...
Definition at line 241 of file sensorAbstract.hpp.
#include <sensorAbstract.hpp>
Public Member Functions | |
| SensorProprioPredictorAbstract (const robot_ptr_t &robPtr, const filtered_obj_t poseInFilter=UNFILTERED, int extraStateFilterSize=0) | |
| virtual void | predict (double t)=0 |
| Generated on Wed Oct 15 2014 00:37:46 for Jafar by doxygen 1.7.6.1 |

|

