|
Jafar
|
|
Jafar
|
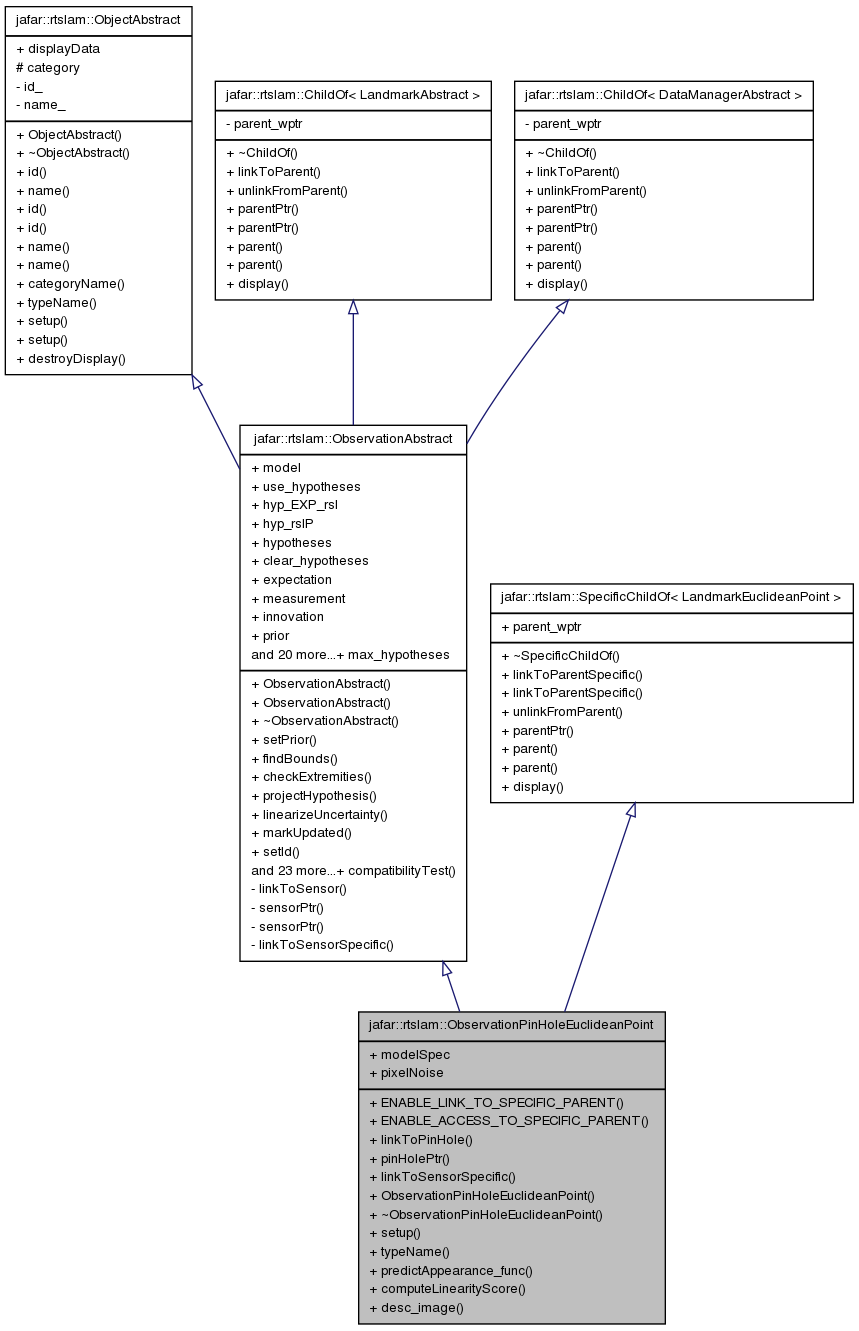
Class for Pin-Hole observations of Euclidean 3D points. More...
Class for Pin-Hole observations of Euclidean 3D points.
Definition at line 103 of file observationPinHoleEuclideanPoint.hpp.
#include <observationPinHoleEuclideanPoint.hpp>
Public Member Functions | |
| ENABLE_LINK_TO_SPECIFIC_PARENT (LandmarkAbstract, LandmarkEuclideanPoint, EUC, ObservationAbstract) | |
| ENABLE_ACCESS_TO_SPECIFIC_PARENT (LandmarkEuclideanPoint, euc) | |
| void | linkToPinHole (ObservationModelPinHoleEuclideanPoint::sensor_spec_ptr_t ptr) |
| ObservationModelPinHoleEuclideanPoint::sensor_spec_ptr_t | pinHolePtr (void) |
| void | linkToSensorSpecific (sensor_ptr_t ptr) |
| ObservationPinHoleEuclideanPoint (const sensor_ptr_t &pinholePtr, const landmark_ptr_t &eucPtr) | |
| void | setup (double dmin) |
| virtual std::string | typeName () const |
| virtual bool | predictAppearance_func () |
| Predict appearance. | |
| virtual double | computeLinearityScore () |
| return a linearity score for the associated converged type. 0 means fully linear. <0 means already converged. | |
| virtual void | desc_image (image::oimstream &os) const |
Public Attributes | |
|
boost::shared_ptr < ObservationModelPinHoleEuclideanPoint > | modelSpec |
| double | pixelNoise |
| Generated on Wed Oct 15 2014 00:37:45 for Jafar by doxygen 1.7.6.1 |

|

