|
Jafar
|
|
Jafar
|
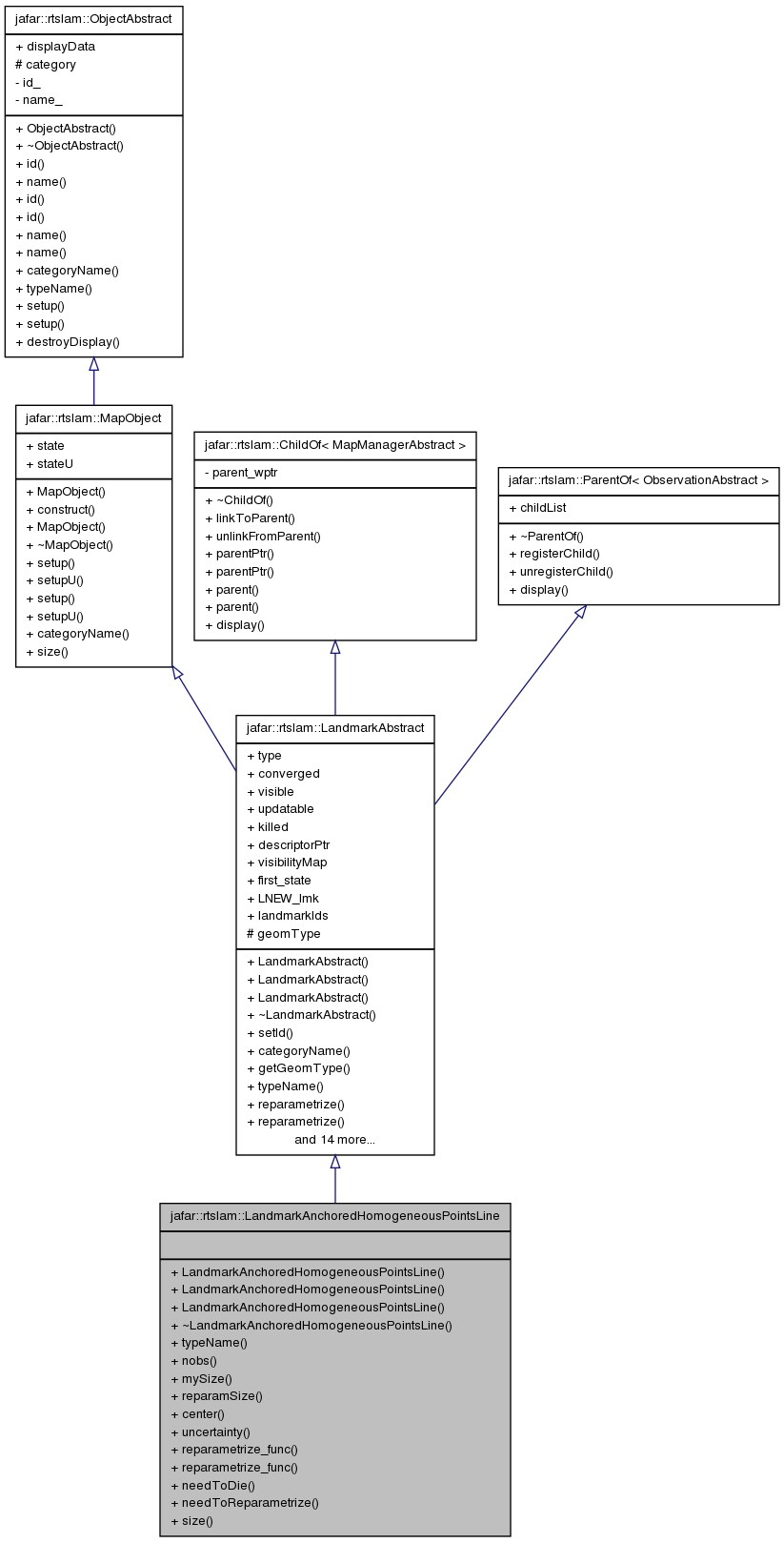
Class for Anchored homogeneous points lines. More...
Class for Anchored homogeneous points lines.
Definition at line 33 of file landmarkAnchoredHomogeneousPointsLine.hpp.
#include <landmarkAnchoredHomogeneousPointsLine.hpp>
Public Member Functions | |
| LandmarkAnchoredHomogeneousPointsLine (const map_ptr_t &mapPtr) | |
| Constructor from map. | |
| LandmarkAnchoredHomogeneousPointsLine (const simulation_t dummy, const map_ptr_t &mapPtr) | |
| Constructor for simulated landmark. | |
| LandmarkAnchoredHomogeneousPointsLine (const map_ptr_t &_mapPtr, const landmark_ptr_t _prevLmk, jblas::ind_array &_icomp) | |
| Constructor by replacement: occupied the same filter state as a specified previous lmk. | |
| virtual std::string | typeName () const |
| virtual jblas::ind_array | nobs () |
| Indices of the state that are supposed to be non observable (typically inverse depth for points from camera ; if the sensor can observe depth, we won't use an inverse depth parametrization) | |
| virtual size_t | mySize () |
| Size of the landmark state. | |
| virtual size_t | reparamSize () |
| Size of the reparametrized landmark. | |
| virtual jblas::vec3 | center () |
| Position x,y,z of the center of the landmark. | |
| virtual double | uncertainty () |
| The max uncertainty of the landmark position (3 sigma in meters) | |
| virtual vec | reparametrize_func (const vec &lmk) const |
| void | reparametrize_func (const vec &lmk, vec &lnew, mat &LNEW_lmk) const |
| virtual bool | needToDie () |
| Evaluate the landmark's special need to die. | |
| virtual bool | needToReparametrize (DecisionMethod met=ALL) |
Static Public Member Functions | |
| static size_t | size (void) |
| jafar::rtslam::LandmarkAnchoredHomogeneousPointsLine::LandmarkAnchoredHomogeneousPointsLine | ( | const map_ptr_t & | _mapPtr, |
| const landmark_ptr_t | _prevLmk, | ||
| jblas::ind_array & | _icomp | ||
| ) |
Constructor by replacement: occupied the same filter state as a specified previous lmk.
_icomp is the complementary memory, to be relaxed by the user.
| virtual bool jafar::rtslam::LandmarkAnchoredHomogeneousPointsLine::needToDie | ( | ) | [virtual] |
Evaluate the landmark's special need to die.
Reimplemented from jafar::rtslam::LandmarkAbstract.
| Generated on Wed Oct 15 2014 00:37:45 for Jafar by doxygen 1.7.6.1 |

|

