|
Jafar
|
|
Jafar
|
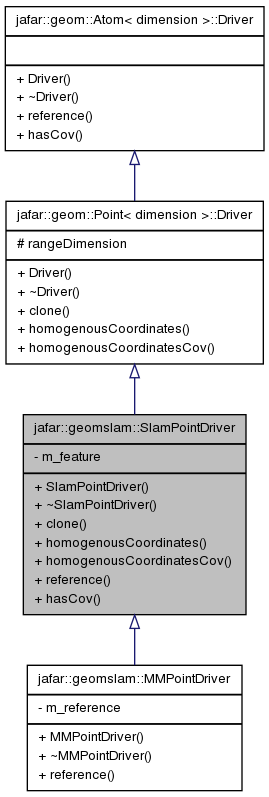
This class provides a geom::Point3D::Driver for a geom::Point3D , that uses the 3D position of a point coming from the slam. More...
This class provides a geom::Point3D::Driver for a geom::Point3D , that uses the 3D position of a point coming from the slam.
This Driver assumes that the state vector of the point is the 3D coordinates.
Definition at line 22 of file Points.hpp.
#include <Points.hpp>
Public Member Functions | |
| SlamPointDriver (const slam::BaseFeature *feature) | |
| virtual Driver * | clone () const |
| virtual HomogenousVecD | homogenousCoordinates () const |
| virtual HomogenousSymMatrixD | homogenousCoordinatesCov () const |
| virtual const geom::Repere3D * | reference () const |
| virtual bool | hasCov () const |
Private Types | |
|
typedef geom::Atom3D::HomogenousVecD | HomogenousVecD |
| typedef geom::Atom3D::VecD | VecD |
|
typedef geom::Atom3D::HomogenousMatrixD | HomogenousMatrixD |
|
typedef geom::Atom3D::HomogenousSymMatrixD | HomogenousSymMatrixD |
Private Attributes | |
| const slam::BaseFeature * | m_feature |
| virtual bool jafar::geomslam::SlamPointDriver::hasCov | ( | ) | const [virtual] |
Implements jafar::geom::Atom< dimension >::Driver.
| virtual HomogenousVecD jafar::geomslam::SlamPointDriver::homogenousCoordinates | ( | ) | const [virtual] |
Implements jafar::geom::Point< dimension >::Driver.
| virtual HomogenousSymMatrixD jafar::geomslam::SlamPointDriver::homogenousCoordinatesCov | ( | ) | const [virtual] |
Implements jafar::geom::Point< dimension >::Driver.
| Generated on Wed Oct 15 2014 00:37:38 for Jafar by doxygen 1.7.6.1 |

|

