|
Jafar
|
|
Jafar
|
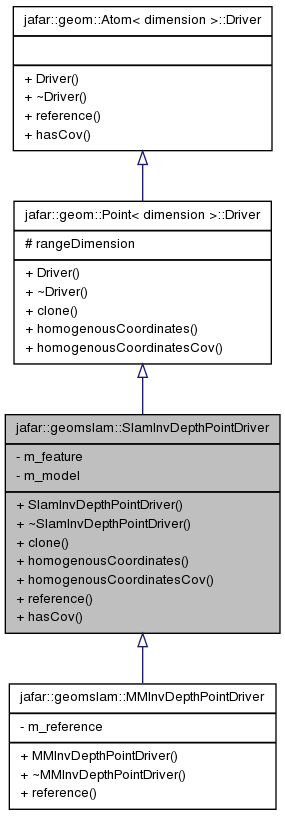
This class provides a geom::Point3D::Driver for a geom::Point3D , that uses the 3D position of a point coming from the slam. More...
This class provides a geom::Point3D::Driver for a geom::Point3D , that uses the 3D position of a point coming from the slam.
This Driver assumes that the state vector of the point is in inverse depth, and it uses the model to convert from the state vector to the 3D coordinates.
Definition at line 48 of file Points.hpp.
#include <Points.hpp>
Public Member Functions | |
| SlamInvDepthPointDriver (const slam::BaseFeature *feature, slam::PointInvDepthFeatureModel &_model) | |
| virtual Driver * | clone () const |
| virtual HomogenousVecD | homogenousCoordinates () const |
| virtual HomogenousSymMatrixD | homogenousCoordinatesCov () const |
| virtual const geom::Repere3D * | reference () const |
| virtual bool | hasCov () const |
Private Types | |
|
typedef geom::Atom3D::HomogenousVecD | HomogenousVecD |
| typedef geom::Atom3D::VecD | VecD |
|
typedef geom::Atom3D::HomogenousMatrixD | HomogenousMatrixD |
|
typedef geom::Atom3D::HomogenousSymMatrixD | HomogenousSymMatrixD |
| typedef geom::Atom3D::SymMatrixD | SymMatrixD |
Private Attributes | |
| const slam::BaseFeature * | m_feature |
| slam::PointInvDepthFeatureModel & | m_model |
| virtual bool jafar::geomslam::SlamInvDepthPointDriver::hasCov | ( | ) | const [virtual] |
Implements jafar::geom::Atom< dimension >::Driver.
| virtual HomogenousVecD jafar::geomslam::SlamInvDepthPointDriver::homogenousCoordinates | ( | ) | const [virtual] |
Implements jafar::geom::Point< dimension >::Driver.
| virtual HomogenousSymMatrixD jafar::geomslam::SlamInvDepthPointDriver::homogenousCoordinatesCov | ( | ) | const [virtual] |
Implements jafar::geom::Point< dimension >::Driver.
| Generated on Wed Oct 15 2014 00:37:38 for Jafar by doxygen 1.7.6.1 |

|

