|
Jafar
|
|
Jafar
|
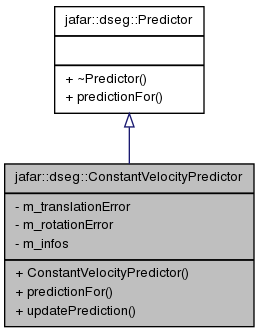
It's a Predictor that use a Constant Velocity model to predict the next postion of a segment. More...
It's a Predictor that use a Constant Velocity model to predict the next postion of a segment.
Definition at line 15 of file ConstantVelocityPredictor.hpp.
#include <ConstantVelocityPredictor.hpp>
Public Member Functions | |
| ConstantVelocityPredictor (double _translationError, double _rotationError) | |
| virtual SegmentHypothesis * | predictionFor (const SegmentHypothesis *) const |
| Creates a new segment hypothesis that can be used to track the segment. | |
| void | updatePrediction (const SegmentsSet &segmentSet) |
Private Attributes | |
| double | m_translationError |
| double | m_rotationError |
| std::map< unsigned int, Info * > | m_infos |
| Generated on Wed Oct 15 2014 00:37:34 for Jafar by doxygen 1.7.6.1 |

|

