|
Jafar
|
|
Jafar
|
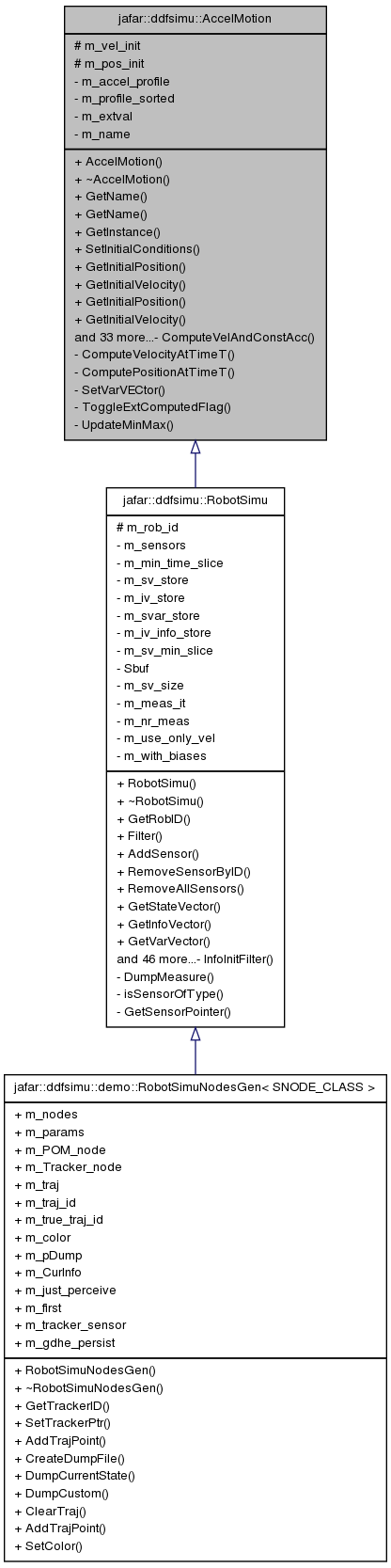
Simulate an accelerated motion. More...
Simulate an accelerated motion.
Definition at line 34 of file accelmotion.hpp.
#include <accelmotion.hpp>
Public Types | |
| enum | SAMPLE_TYPE { SAMPLE_ACC = 1 << 0, SAMPLE_VEL = 1 << 1, SAMPLE_POS = 1 << 2 } |
| enum | SV_IDX_TYPE { SV_X, SV_VX, SV_AX, SV_Y, SV_VY, SV_AY, SV_Z, SV_VZ, SV_AZ, SV_BAX, SV_BAY, SV_BAZ } |
Public Member Functions | |
| AccelMotion (std::string name) | |
| std::string const & | GetName () const |
| void | GetName (char *name) const |
| void * | GetInstance () |
| void | SetInitialConditions (VEC const &v0, VEC const &p0) |
| void | GetInitialPosition (VEC &p) const |
| void | GetInitialVelocity (VEC &v) const |
| VEC const & | GetInitialPosition () const |
| VEC const & | GetInitialVelocity () const |
| VEC | GetFinalPosition () |
| unsigned short | GetProfileSize () const |
| VEC const & | GetAccel (unsigned short idx) const |
| AccProfileItem const * | GetAccelItem (unsigned short idx) const |
| void | AddToAccelProfile (AccProfileItem const &item) |
| void | AddToAccelProfile (double t, VEC const &a) |
| void | SortAccelProfile () |
| bool | IsProfileSorted () const |
| void | ComputeVelocityAndPos (double time, VEC &velocity, VEC &position) const |
| void | PrintInitialConditions () const |
| void | PrintAccelProfile () |
| double | FillArrayWithSamples (float *pArray, unsigned short samples, SAMPLE_TYPE type, AXIS_TYPE axis) |
| VEC | GetAccelAtTimeT (double t) const |
| VEC | GetInitialAccel () const |
| VEC | ComputePositionAtTimeT (double t) const |
| double | GetMaxTime () const |
| double | GetMinTimeSec () const |
| time | GetMinTime () const |
| double | GetTimeSpan () const |
| virtual double | GetMinTimeSlice () const |
| virtual unsigned short | GetMinSamplesNr () const |
| void | ComputeExtremeValues () |
| bool | IsExtremeComputed () |
| ExtValStruct | GetExtremeValues (AXIS_TYPE type) |
| ExtValStruct | GetExtremeValues (AccelMotion &r, AXIS_TYPE type=AXIS_TYPE(AXIS_Z+1)) |
| void | PrintExtreme (AXIS_TYPE type) |
| void | PrintExtreme (ExtValStruct &extval) |
| void | FillProfile (unsigned short buf_size, double data[][4]) |
| void | ClearProfile () |
| void | GdheTrajCmd (unsigned short nbpoints, std::string *str) |
| unsigned short | FillGdheTrajectory (unsigned short nbpoints, float traj[][3], bool purge=true, double time_span=-1.0) |
| void | FillState (VEC const &pos, VEC const &vel, VEC const &acc, VEC &state) |
| void | FillState (time const &t, VEC &state) |
| void | FillStateVelocity (time const &t, VEC &state) |
Protected Attributes | |
| VEC | m_vel_init |
| VEC | m_pos_init |
Private Member Functions | |
| void | ComputeVelAndConstAcc (double const time, VEC const &a, VEC const &v_init, VEC const &p_init, VEC *vel, VEC *pos=NULL) |
| VEC | ComputeVelocityAtTimeT (AccProfileItem const &acc_t, AccProfileItem const &acc_t1, VEC const &v0, double T) const |
| VEC | ComputePositionAtTimeT (AccProfileItem const &acc_t, AccProfileItem const &acc_t1, VEC const &v0, VEC const &x0, double T) const |
| void | SetVarVECtor (SAMPLE_TYPE type, double x, double y, double z) |
| void | ToggleExtComputedFlag (bool val) |
| void | UpdateMinMax (ExtValStruct *pextval, VEC &accel, VEC &vel, VEC &pos) |
Private Attributes | |
| AccelProfile | m_accel_profile |
| bool | m_profile_sorted |
| ExtValStruct | m_extval [4] |
| std::string | m_name |
| Generated on Wed Oct 15 2014 00:37:33 for Jafar by doxygen 1.7.6.1 |

|

