|
Jafar
|
|
Jafar
|
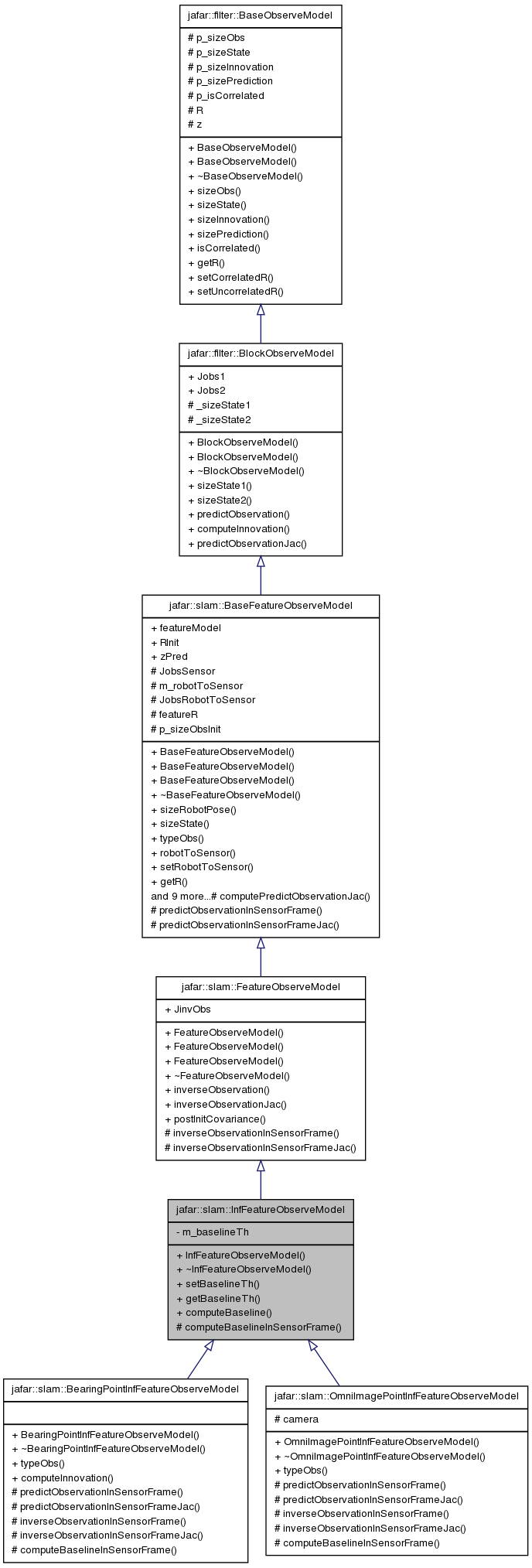
A feature at infinity observe model. More...
A feature at infinity observe model.
This kind of feature has the same properties as a FeatureObserveModel.
Definition at line 212 of file bearingOnlyFeature.hpp.
#include <bearingOnlyFeature.hpp>
Public Member Functions | |
| InfFeatureObserveModel (FeatureModel &model, std::size_t sizeObs_) | |
| void | setBaselineTh (double baselineTh) |
| double | getBaselineTh () const |
| double | computeBaseline (jblas::vec const &poseRef, Observation const &obsRef, jblas::vec_range const &poseCur) const |
| Computes the baseline which is gained between a reference (pose, observation) and a given pose. | |
Protected Member Functions | |
| virtual double | computeBaselineInSensorFrame (jblas::vec_range const &deltaPose, Observation const &obsRef) const =0 |
| Computes the baseline in the sensor frame. | |
Private Attributes | |
| double | m_baselineTh |
| virtual double jafar::slam::InfFeatureObserveModel::computeBaselineInSensorFrame | ( | jblas::vec_range const & | deltaPose, |
| Observation const & | obsRef | ||
| ) | const [protected, pure virtual] |
Computes the baseline in the sensor frame.
Implemented in jafar::slam::OmniImagePointInfFeatureObserveModel, and jafar::slam::BearingPointInfFeatureObserveModel.
| Generated on Wed Oct 15 2014 00:37:48 for Jafar by doxygen 1.7.6.1 |

|

