|
Jafar
|
|
Jafar
|
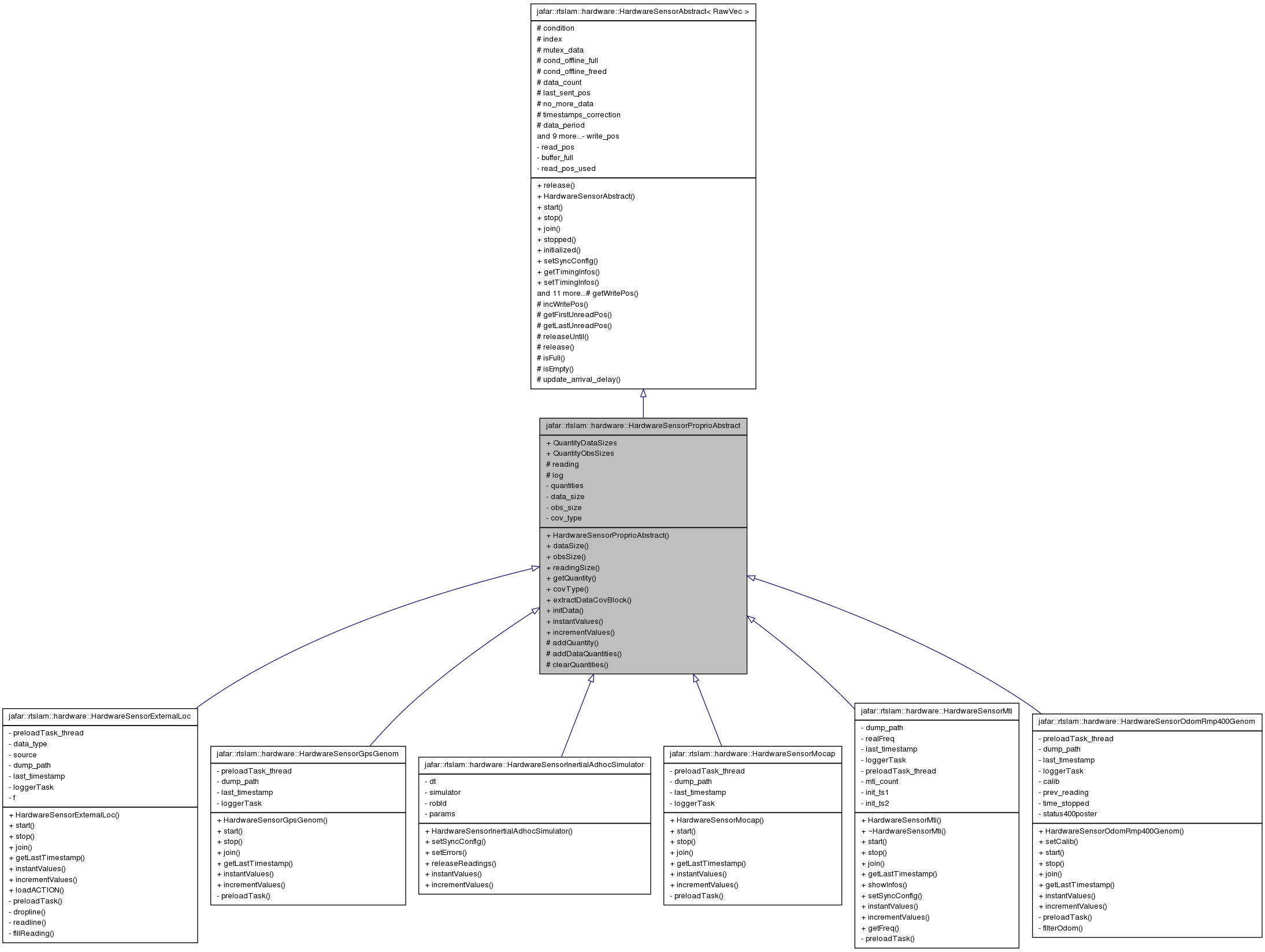
Definition at line 300 of file hardwareSensorAbstract.hpp.
Public Types | |
| enum | Quantity { qPos, qOriQuat, qOriEuler, qVel, qAbsVel, qNormVel, qAngVel, qAbsAngVel, qAcc, qAbsAcc, qBundleobs, qMag, qNQuantity } |
| enumerates the different quantities that a proprioceptive sensor can provide More... | |
| enum | CovType { ctNone, ctVar, ctFull } |
Public Member Functions | |
| HardwareSensorProprioAbstract (kernel::VariableCondition< int > *condition, Mode mode, unsigned bufferSize, CovType covType) | |
| size_t | dataSize () |
| size_t | obsSize () |
| number of measure variables provided (without timestamp and variance) | |
| size_t | readingSize () |
| number of observation variables among measure variables (that can be predicted from the robot state and the rest of the measure variables) | |
| size_t | getQuantity (Quantity quantity) |
| the size of a reading vector that stores everything | |
| CovType | covType () |
| get index of quantity, -1 if not measured | |
| jblas::sym_mat | extractDataCovBlock (size_t pos, size_t size) |
| does this hardware sensor return full covariance matrices with data? | |
| void | initData () |
| virtual jblas::ind_array | instantValues ()=0 |
| This function must return the indices of values returned by acquireReadings that represent the instant value of a physical quantity (speed, acceleration, ...) (except first column which is time) These values will typically be integrated. | |
| virtual jblas::ind_array | incrementValues ()=0 |
| This function must return the indices of values returned by acquireReadings that represent the increment of a physical quantity since last reading (odometry, ...) | |
Static Public Attributes | |
| static const int | QuantityDataSizes [qNQuantity] |
| static const int | QuantityObsSizes [qNQuantity] |
Protected Member Functions | |
| void | addQuantity (Quantity quantity) |
| void | addDataQuantities (int n) |
| void | clearQuantities () |
Protected Attributes | |
| RawVec | reading |
| ProprioLog | log |
Private Attributes | |
| int | quantities [qNQuantity] |
| size_t | data_size |
| size_t | obs_size |
| CovType | cov_type |
enumerates the different quantities that a proprioceptive sensor can provide
| qPos | position (x y z) |
| qOriQuat | orientation as a quaternion (qx qy qz qw) |
| qOriEuler | orientation as euler angles (ex ey ez) |
| qVel | linear velocity in the sensor's frame (vx vy vz) |
| qAbsVel | linear velocity in the world's frame (vx vy vz) |
| qNormVel | norm of linear velocity (v) |
| qAngVel | angular velocity in the sensor's frame (wx wy wz) |
| qAbsAngVel | angular velocity in the world's frame (wx wy wz) |
| qAcc | acceleration in the sensor's frame (ax ay az) |
| qAbsAcc | acceleration in the world's frame (ax ay az) |
| qBundleobs | observation of the direction between the robot and some known position (landmark, other robot, ...) (x y z ux uy uz). Note that the observation can be made by the robot itself or by something else and sent to the robot, but the convention is that in any case (ux,uy,uz) must be oriented from the robot to the other known position. |
Definition at line 319 of file hardwareSensorAbstract.hpp.
| Generated on Wed Oct 15 2014 00:37:47 for Jafar by doxygen 1.7.6.1 |

|

