|
Jafar
|
|
Jafar
|
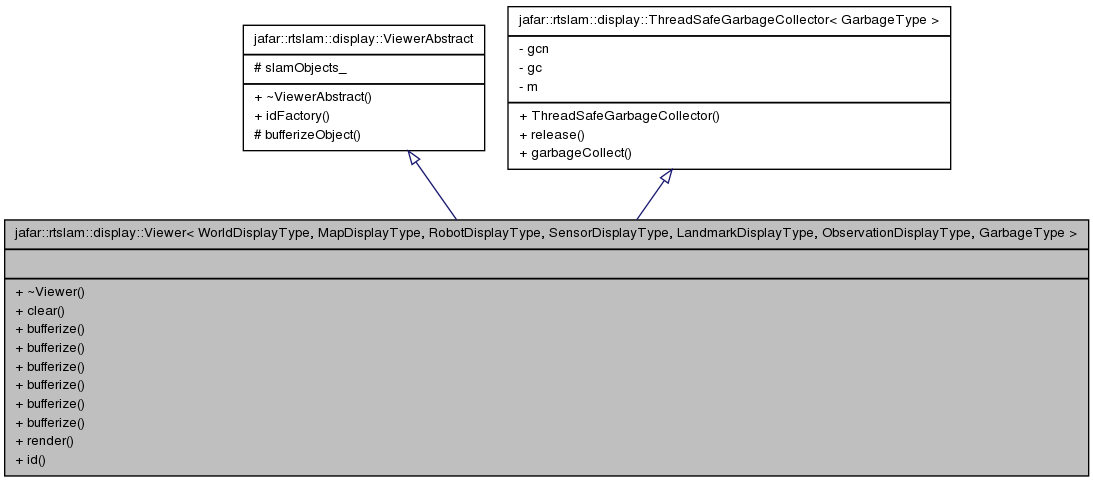
************************************************************************** This is the base class for a viewer that can render the scene. More...
************************************************************************** This is the base class for a viewer that can render the scene.
When writing a new viewer, it must be inherited from this.
Definition at line 269 of file display.hpp.
#include <display.hpp>
Classes | |
| class | Render |
Public Member Functions | |
| void | clear () |
| void | bufferize (rtslam::world_ptr_t wor) |
| This function bufferizes all the objects. | |
| void | bufferize (rtslam::map_ptr_t map, rtslam::world_ptr_t wor) |
| void | bufferize (rtslam::robot_ptr_t rob, rtslam::map_ptr_t map) |
| void | bufferize (rtslam::sensorext_ptr_t sen, rtslam::robot_ptr_t rob) |
| void | bufferize (rtslam::observation_ptr_t obs, rtslam::sensorext_ptr_t sen) |
| void | bufferize (rtslam::landmark_ptr_t lmk, rtslam::map_ptr_t map) |
| void | render () |
| Render the scene. | |
Static Public Member Functions | |
| static IdFactory::storage_t & | id () |
| void jafar::rtslam::display::Viewer< WorldDisplayType, MapDisplayType, RobotDisplayType, SensorDisplayType, LandmarkDisplayType, ObservationDisplayType, GarbageType >::render | ( | ) | [inline] |
| Generated on Wed Oct 15 2014 00:37:46 for Jafar by doxygen 1.7.6.1 |

|

